 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFD-RIO: Fast Dense Radar Inertial Odometry
May 12, 2025

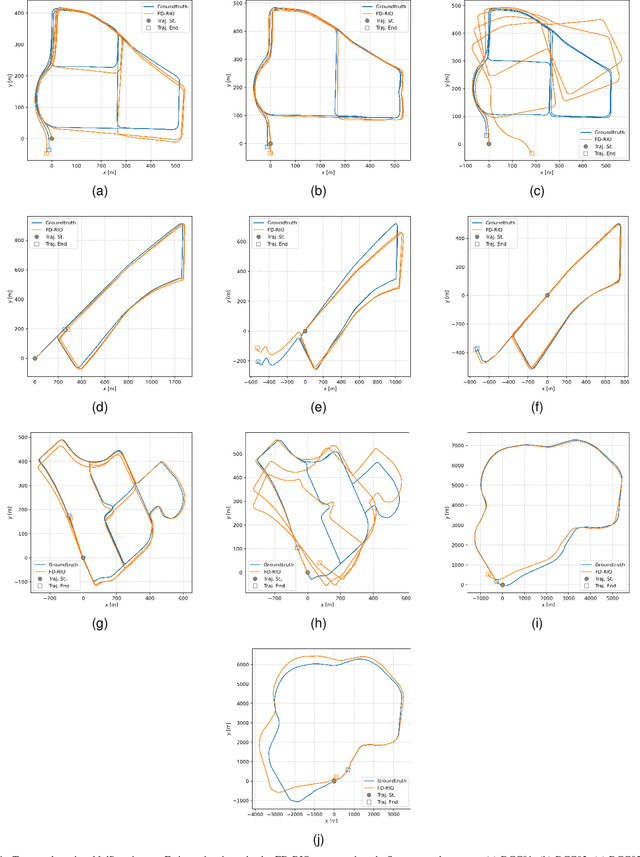

Radar-based odometry is a popular solution for ego-motion estimation in conditions where other exteroceptive sensors may degrade, whether due to poor lighting or challenging weather conditions; however, scanning radars have the downside of relatively lower sampling rate and spatial resolution. In this work, we present FD-RIO, a method to alleviate this problem by fusing noisy, drift-prone, but high-frequency IMU data with dense radar scans. To the best of our knowledge, this is the first attempt to fuse dense scanning radar odometry with IMU using a Kalman filter. We evaluate our methods using two publicly available datasets and report accuracies using standard KITTI evaluation metrics, in addition to ablation tests and runtime analysis. Our phase correlation -based approach is compact, intuitive, and is designed to be a practical solution deployable on a realistic hardware setup of a mobile platform. Despite its simplicity, FD-RIO is on par with other state-of-the-art methods and outperforms in some test sequences.
Conveyor Line Color Object Sorting using A Monochrome Camera, Colored Light and RGB Filters
Feb 12, 2025This paper tests the ability of a machine vision system with a monochrome camera to differentiate colored objects. The system is designed to autonomously and continuously sort colored objects of which the user specifies the desired color(s). The system uses camera color light filters and red-green-blue (RGB) color light emitting diode (LED) lights to aid the machine vision system in recognizing part contrast. Additionally the system is controlled by a Programmable Logic Controller (PLC) which is integrated with a Robot that is used to remove parts. The parts are fed into the workcell via a conveyor belt that is controlled by the PLC. The user has the ability to select the desired acceptable colors on both the HMI and the physical pushbuttons.
What Is Near?: Room Locality Learning for Enhanced Robot Vision-Language-Navigation in Indoor Living Environments
Sep 10, 2023Humans use their knowledge of common house layouts obtained from previous experiences to predict nearby rooms while navigating in new environments. This greatly helps them navigate previously unseen environments and locate their target room. To provide layout prior knowledge to navigational agents based on common human living spaces, we propose WIN (\textit{W}hat \textit{I}s \textit{N}ear), a commonsense learning model for Vision Language Navigation (VLN) tasks. VLN requires an agent to traverse indoor environments based on descriptive navigational instructions. Unlike existing layout learning works, WIN predicts the local neighborhood map based on prior knowledge of living spaces and current observation, operating on an imagined global map of the entire environment. The model infers neighborhood regions based on visual cues of current observations, navigational history, and layout common sense. We show that local-global planning based on locality knowledge and predicting the indoor layout allows the agent to efficiently select the appropriate action. Specifically, we devised a cross-modal transformer that utilizes this locality prior for decision-making in addition to visual inputs and instructions. Experimental results show that locality learning using WIN provides better generalizability compared to classical VLN agents in unseen environments. Our model performs favorably on standard VLN metrics, with Success Rate 68\% and Success weighted by Path Length 63\% in unseen environments.
Radar Odometry for Autonomous Ground Vehicles: A Survey of Methods and Datasets
Jul 15, 2023Radar odometry has been gaining attention in the last decade. It stands as one of the best solutions for robotic state estimation in unfavorable conditions; conditions where other interoceptive and exteroceptive sensors may fall short. Radars are widely adopted, resilient to weather and illumination, and provide Doppler information which make them very attractive for such tasks. This article presents an extensive survey of the latest work on ground-based radar odometry for autonomous robots. It covers technologies, datasets, metrics, and approaches that have been developed in the last decade in addition to in-depth analysis and categorization of the various methods and techniques applied to tackle this problem. This article concludes with challenges and future recommendations to advance the field of radar odometry making it a great starting point for newcomers and a valuable reference for experienced researchers.