 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeN-QR: Natural Quick Response Codes for Multi-Robot Instance Correspondence
Mar 09, 2024
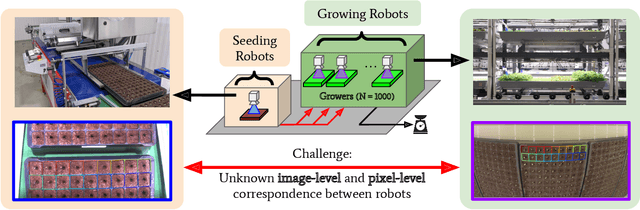

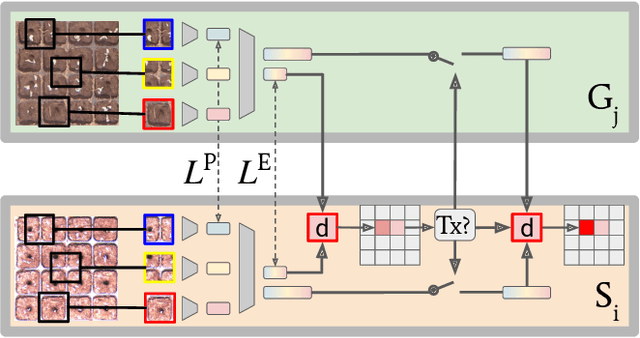
Image correspondence serves as the backbone for many tasks in robotics, such as visual fusion, localization, and mapping. However, existing correspondence methods do not scale to large multi-robot systems, and they struggle when image features are weak, ambiguous, or evolving. In response, we propose Natural Quick Response codes, or N-QR, which enables rapid and reliable correspondence between large-scale teams of heterogeneous robots. Our method works like a QR code, using keypoint-based alignment, rapid encoding, and error correction via ensembles of image patches of natural patterns. We deploy our algorithm in a production-scale robotic farm, where groups of growing plants must be matched across many robots. We demonstrate superior performance compared to several baselines, obtaining a retrieval accuracy of 88.2%. Our method generalizes to a farm with 100 robots, achieving a 12.5x reduction in bandwidth and a 20.5x speedup. We leverage our method to correspond 700k plants and confirm a link between a robotic seeding policy and germination.
We Need to Talk: Identifying and Overcoming Communication-Critical Scenarios for Self-Driving
May 07, 2023
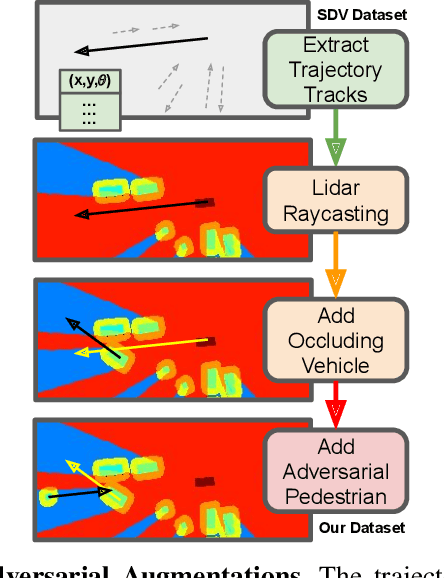


In this work, we consider the task of collision-free trajectory planning for connected self-driving vehicles. We specifically consider communication-critical situations--situations where single-agent systems have blindspots that require multi-agent collaboration. To identify such situations, we propose a method which (1) simulates multi-agent perspectives from real self-driving datasets, (2) finds scenarios that are challenging for isolated agents, and (3) augments scenarios with adversarial obstructions. To overcome these challenges, we propose to extend costmap-based trajectory evaluation to a distributed multi-agent setting. We demonstrate that our bandwidth-efficient, uncertainty-aware method reduces collision rates by up to 62.5% compared to single agent baselines.
Communication-Critical Planning via Multi-Agent Trajectory Exchange
Mar 10, 2023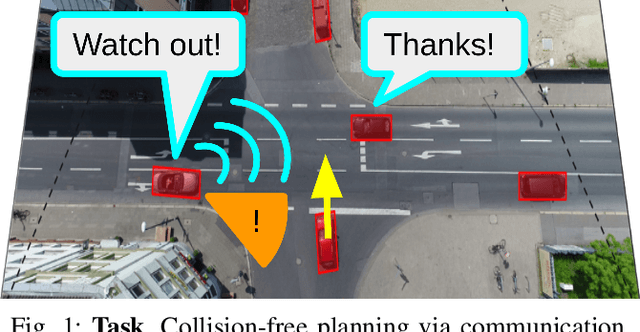

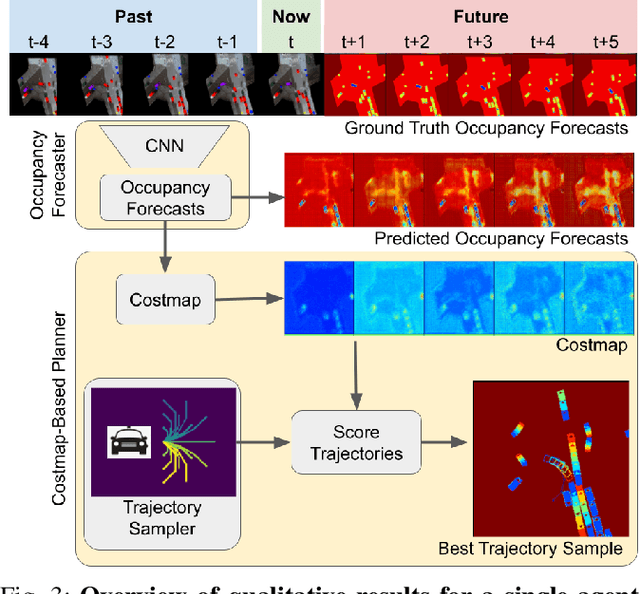

This paper addresses the task of joint multi-agent perception and planning, especially as it relates to the real-world challenge of collision-free navigation for connected self-driving vehicles. For this task, several communication-enabled vehicles must navigate through a busy intersection while avoiding collisions with each other and with obstacles. To this end, this paper proposes a learnable costmap-based planning mechanism, given raw perceptual data, that is (1) distributed, (2) uncertainty-aware, and (3) bandwidth-efficient. Our method produces a costmap and uncertainty-aware entropy map to sort and fuse candidate trajectories as evaluated across multiple-agents. The proposed method demonstrates several favorable performance trends on a suite of open-source overhead datasets as well as within a novel communication-critical simulator. It produces accurate semantic occupancy forecasts as an intermediate perception output, attaining a 72.5% average pixel-wise classification accuracy. By selecting the top trajectory, the multi-agent method scales well with the number of agents, reducing the hard collision rate by up to 57% with eight agents compared to the single-agent version.