 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFew-Shot Transfer Learning for Individualized Braking Intent Detection on Neuromorphic Hardware
Jul 21, 2024Objective: This work explores use of a few-shot transfer learning method to train and implement a convolutional spiking neural network (CSNN) on a BrainChip Akida AKD1000 neuromorphic system-on-chip for developing individual-level, instead of traditionally used group-level, models using electroencephalographic data. The efficacy of the method is studied on an advanced driver assist system related task of predicting braking intention. Main Results: Efficacy of the above methodology to develop individual specific braking intention predictive models by rapidly adapting the group-level model in as few as three training epochs while achieving at least 90% accuracy, true positive rate and true negative rate is presented. Further, results show an energy reduction of over 97% with only a 1.3x increase in latency when using the Akida AKD1000 processor for network inference compared to an Intel Xeon CPU. Similar results were obtained in a subsequent ablation study using a subset of five out of 19 channels. Significance: Especially relevant to real-time applications, this work presents an energy-efficient, few-shot transfer learning method that is implemented on a neuromorphic processor capable of training a CSNN as new data becomes available, operating conditions change, or to customize group-level models to yield personalized models unique to each individual.
Convolutional Spiking Neural Networks for Detecting Anticipatory Brain Potentials Using Electroencephalogram
Aug 14, 2022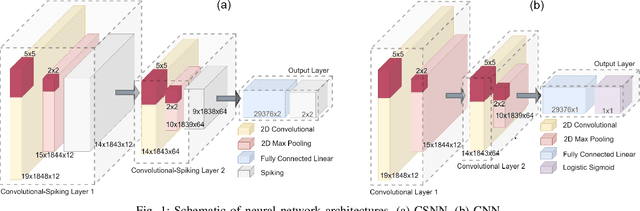
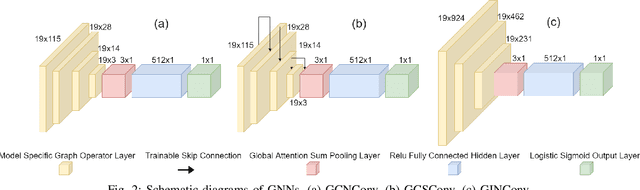
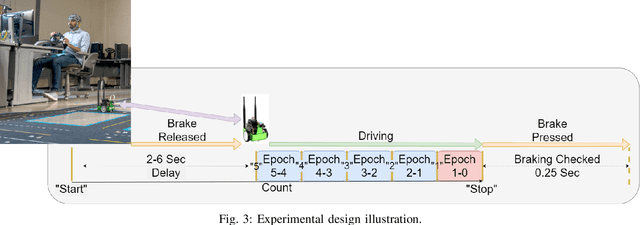

Spiking neural networks (SNNs) are receiving increased attention as a means to develop "biologically plausible" machine learning models. These networks mimic synaptic connections in the human brain and produce spike trains, which can be approximated by binary values, precluding high computational cost with floating-point arithmetic circuits. Recently, the addition of convolutional layers to combine the feature extraction power of convolutional networks with the computational efficiency of SNNs has been introduced. In this paper, the feasibility of using a convolutional spiking neural network (CSNN) as a classifier to detect anticipatory slow cortical potentials related to braking intention in human participants using an electroencephalogram (EEG) was studied. The EEG data was collected during an experiment wherein participants operated a remote controlled vehicle on a testbed designed to simulate an urban environment. Participants were alerted to an incoming braking event via an audio countdown to elicit anticipatory potentials that were then measured using an EEG. The CSNN's performance was compared to a standard convolutional neural network (CNN) and three graph neural networks (GNNs) via 10-fold cross-validation. The results showed that the CSNN outperformed the other neural networks.
Online-Learning Deep Neuro-Adaptive Dynamic Inversion Controller for Model Free Control
Jul 21, 2021
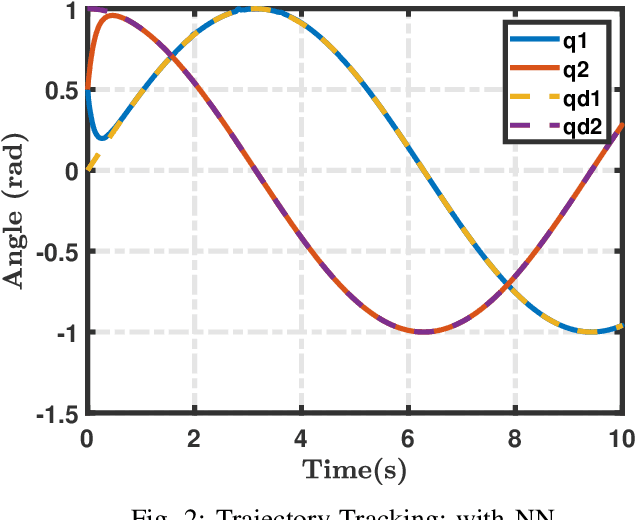
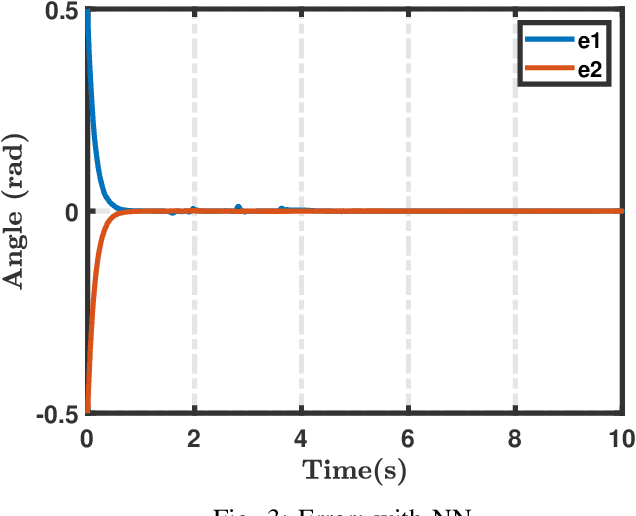
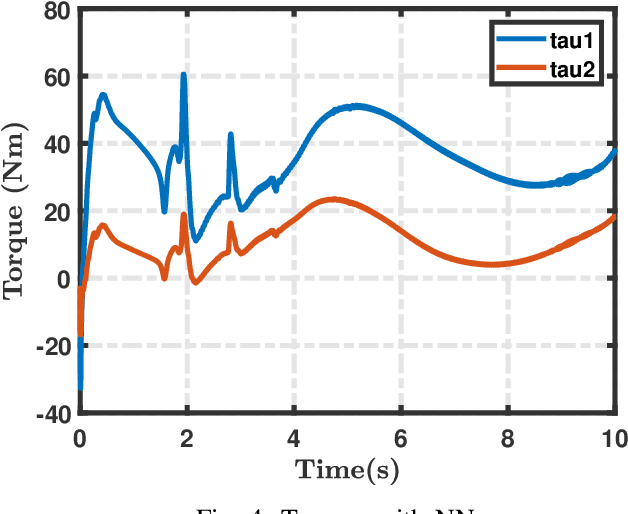
Adaptive methods are popular within the control literature due to the flexibility and forgiveness they offer in the area of modelling. Neural network adaptive control is favorable specifically for the powerful nature of the machine learning algorithm to approximate unknown functions and for the ability to relax certain constraints within traditional adaptive control. Deep neural networks are large framework networks with vastly superior approximation characteristics than their shallow counterparts. However, implementing a deep neural network can be difficult due to size specific complications such as vanishing/exploding gradients in training. In this paper, a neuro-adaptive controller is implemented featuring a deep neural network trained on a new weight update law that escapes the vanishing/exploding gradient problem by only incorporating the sign of the gradient. The type of controller designed is an adaptive dynamic inversion controller utilizing a modified state observer in a secondary estimation loop to train the network. The deep neural network learns the entire plant model on-line, creating a controller that is completely model free. The controller design is tested in simulation on a 2 link planar robot arm. The controller is able to learn the nonlinear plant quickly and displays good performance in the tracking control problem.