 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRetrieving Effective Acoustic Impedance and Refractive Index for Size Mismatch Samples
Dec 26, 2021


In this paper, we have presented an analytical solution to extract the effective properties of acoustic metamaterials from the measured complex transmission and reflection coefficients when the metamaterial and impedance tube have different sizes. We have first modeled this problem as a bilayer metamaterial located inside a duct and treated the air gap as a separate domain. Then we have mathematically proved that the effective properties of acoustic metamaterial can be obtained by solving a set of eight linear equations when the dimensions are known. Finally, we have evaluated the proposed method with results from numerical simulations. It is shown that the proposed method can calculate the effective refractive index and impedance with an error of below 1\%. This method provides an efficient approach to analyzing the effective properties of acoustic metamaterials of various sizes.
Performance satisfaction in Harpy, a thruster-assisted bipedal robot
Apr 29, 2020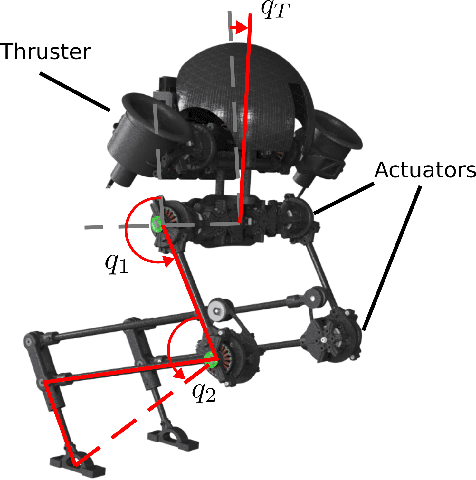


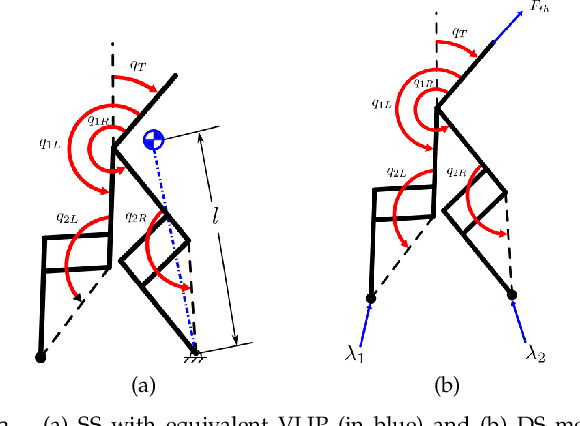
We will report our efforts in designing feedback for the thruster-assisted walking of a bipedal robot. We will assume for well-tuned supervisory controllers and will focus on fine-tuning the desired joint trajectories to satisfy the performance being sought. In doing this, we will devise an intermediary filter based on the emerging idea of reference governors. Since these modifications and impact events lead to deviations from the desired periodic orbits, we will guarantee hybrid invariance in a robust fashion by applying predictive schemes within a short time envelope during the double support phase of a gait cycle. To achieve the hybrid invariance, we will leverage the unique features in our robot, i.e., the thruster.