Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear Observer Design for Landmark-Inertial Simultaneous Localization and Mapping
Apr 05, 2025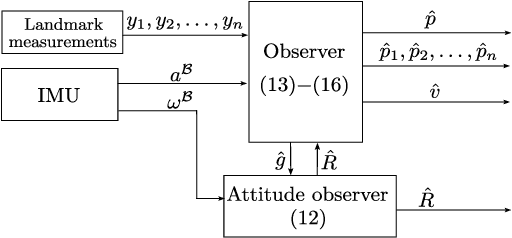
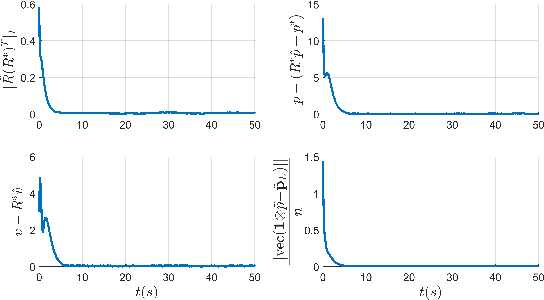
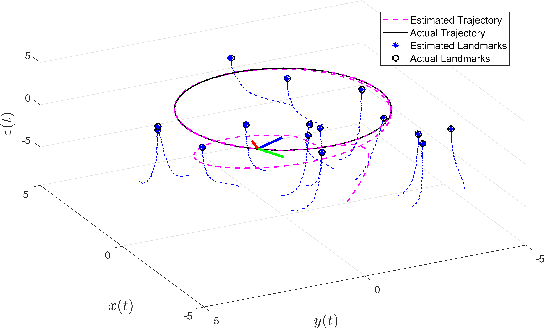
This paper addresses the problem of Simultaneous Localization and Mapping (SLAM) for rigid body systems in three-dimensional space. We introduce a new matrix Lie group SE_{3+n}(3), whose elements are composed of the pose, gravity, linear velocity and landmark positions, and propose an almost globally asymptotically stable nonlinear geometric observer that integrates Inertial Measurement Unit (IMU) data with landmark measurements. The proposed observer estimates the pose and map up to a constant position and a constant rotation about the gravity direction. Numerical simulations are provided to validate the performance and effectiveness of the proposed observer, demonstrating its potential for robust SLAM applications.
Via