 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMethod for the generation of depth images for view-based shape retrieval of 3D CAD model from partial point cloud
Jun 30, 2020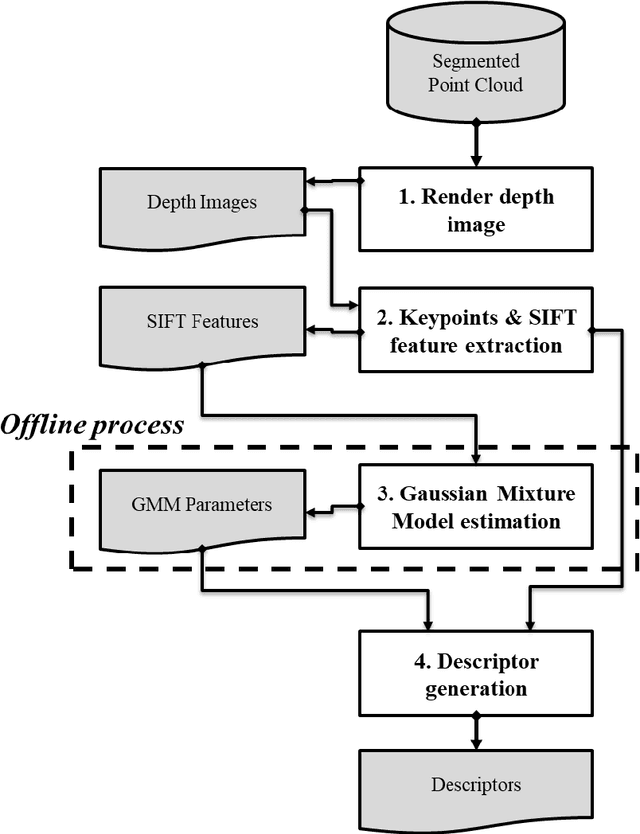
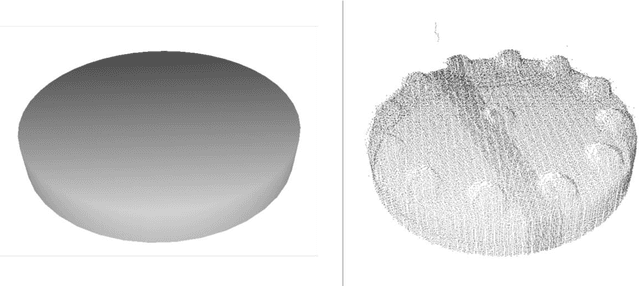
A laser scanner can easily acquire the geometric data of physical environments in the form of a point cloud. Recognizing objects from a point cloud is often required for industrial 3D reconstruction, which should include not only geometry information but also semantic information. However, recognition process is often a bottleneck in 3D reconstruction because it requires expertise on domain knowledge and intensive labor. To address this problem, various methods have been developed to recognize objects by retrieving the corresponding model in the database from an input geometry query. In recent years, the technique of converting geometric data into an image and applying view-based 3D shape retrieval has demonstrated high accuracy. Depth image which encodes depth value as intensity of pixel is frequently used for view-based 3D shape retrieval. However, geometric data collected from objects is often incomplete due to the occlusions and the limit of line of sight. Image generated by occluded point clouds lowers the performance of view-based 3D object retrieval due to loss of information. In this paper, we propose a method of viewpoint and image resolution estimation method for view-based 3D shape retrieval from point cloud query. Automatic selection of viewpoint and image resolution by calculating the data acquisition rate and density from the sampled viewpoints and image resolutions are proposed. The retrieval performance from the images generated by the proposed method is experimented and compared for various dataset. Additionally, view-based 3D shape retrieval performance with deep convolutional neural network has been experimented with the proposed method.