 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiresolution Dual-Polynomial Decomposition Approach for Optimized Characterization of Motor Intent in Myoelectric Control Systems
Nov 10, 2022



Surface electromyogram (sEMG) is arguably the most sought-after physiological signal with a broad spectrum of biomedical applications, especially in miniaturized rehabilitation robots such as multifunctional prostheses. The widespread use of sEMG to drive pattern recognition (PR)-based control schemes is primarily due to its rich motor information content and non-invasiveness. Moreover, sEMG recordings exhibit non-linear and non-uniformity properties with inevitable interferences that distort intrinsic characteristics of the signal, precluding existing signal processing methods from yielding requisite motor control information. Therefore, we propose a multiresolution decomposition driven by dual-polynomial interpolation (MRDPI) technique for adequate denoising and reconstruction of multi-class EMG signals to guarantee the dual-advantage of enhanced signal quality and motor information preservation. Parameters for optimal MRDPI configuration were constructed across combinations of thresholding estimation schemes and signal resolution levels using EMG datasets of amputees who performed up to 22 predefined upper-limb motions acquired in-house and from the public NinaPro database. Experimental results showed that the proposed method yielded signals that led to consistent and significantly better decoding performance for all metrics compared to existing methods across features, classifiers, and datasets, offering a potential solution for practical deployment of intuitive EMG-PR-based control schemes for multifunctional prostheses and other miniaturized rehabilitation robotic systems that utilize myoelectric signals as control inputs.
Analyzing the Impact of Varied Window Hyper-parameters on Deep CNN for sEMG based Motion Intent Classification
Sep 13, 2022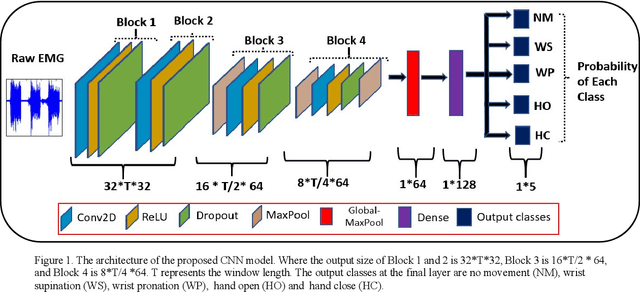
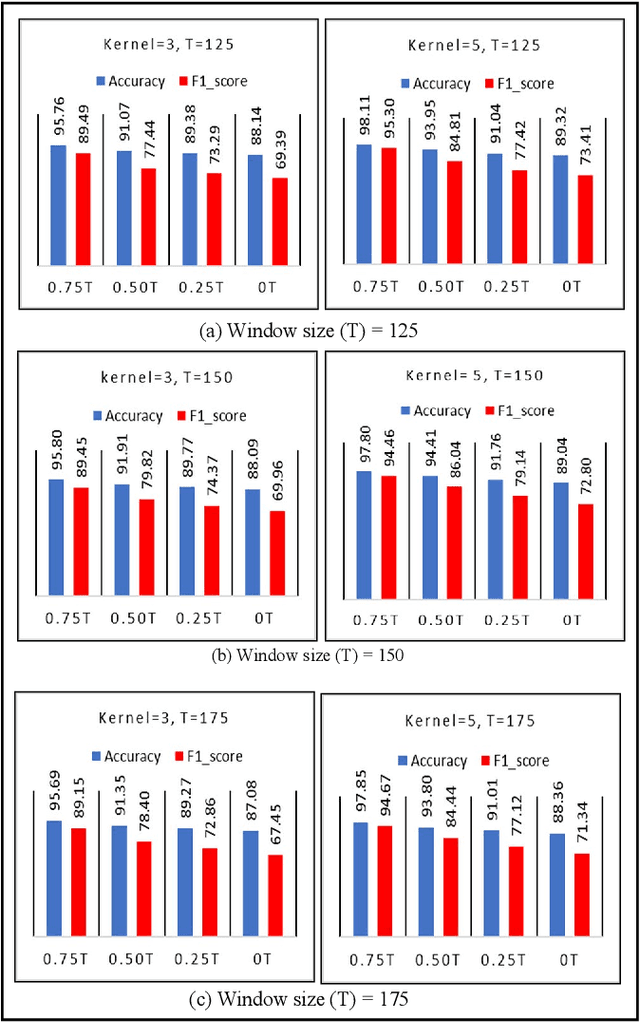
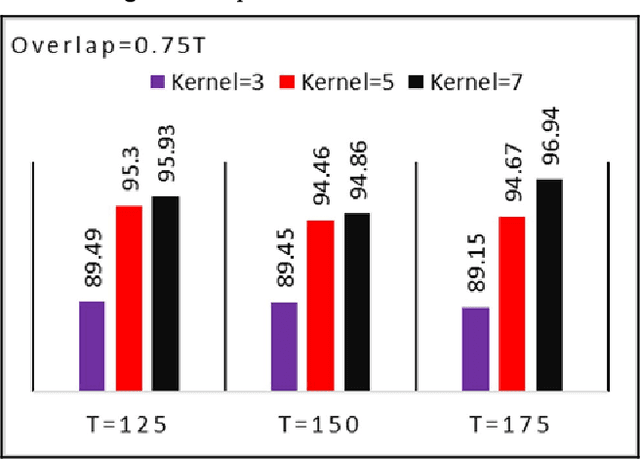
The use of deep neural networks in electromyogram (EMG) based prostheses control provides a promising alternative to the hand-crafted features by automatically learning muscle activation patterns from the EMG signals. Meanwhile, the use of raw EMG signals as input to convolution neural networks (CNN) offers a simple, fast, and ideal scheme for effective control of prostheses. Therefore, this study investigates the relationship between window length and overlap, which may influence the generation of robust raw EMG 2-dimensional (2D) signals for application in CNN. And a rule of thumb for a proper combination of these parameters that could guarantee optimal network performance was derived. Moreover, we investigate the relationship between the CNN receptive window size and the raw EMG signal size. Experimental results show that the performance of the CNN increases with the increase in overlap within the generated signals, with the highest improvement of 9.49% accuracy and 23.33% F1-score realized when the overlap is 75% of the window length. Similarly, the network performance increases with the increase in receptive window (kernel) size. Findings from this study suggest that a combination of 75% overlap in 2D EMG signals and wider network kernels may provide ideal motor intents classification for adequate EMG-CNN based prostheses control scheme.