 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Control of a Line Follower Robot Using a Q-Learning Controller
Jan 23, 2020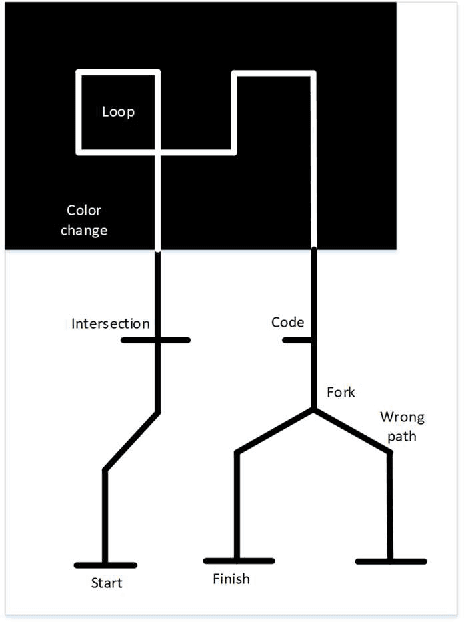
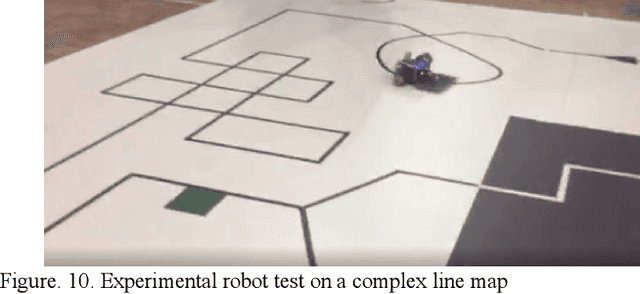
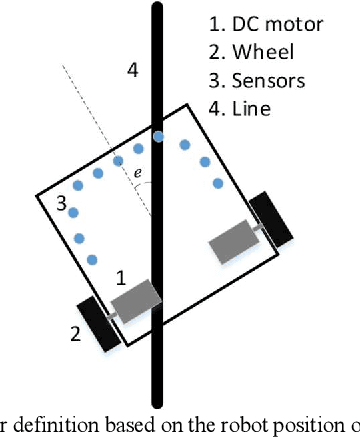
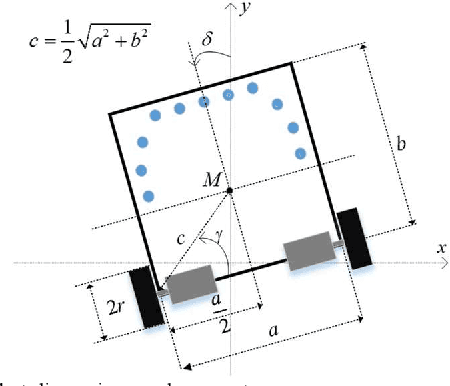
In this paper, a MIMO simulated annealing SA based Q learning method is proposed to control a line follower robot. The conventional controller for these types of robots is the proportional P controller. Considering the unknown mechanical characteristics of the robot and uncertainties such as friction and slippery surfaces, system modeling and controller designing can be extremely challenging. The mathematical modeling for the robot is presented in this paper, and a simulator is designed based on this model. The basic Q learning methods are based pure exploitation and the epsilon-greedy methods, which help exploration, can harm the controller performance after learning completion by exploring nonoptimal actions. The simulated annealing based Q learning method tackles this drawback by decreasing the exploration rate when the learning increases. The simulation and experimental results are provided to evaluate the effectiveness of the proposed controller.
Estimating the Rating of Reviewers Based on the Text
May 22, 2018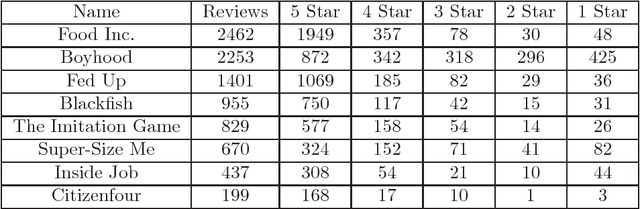
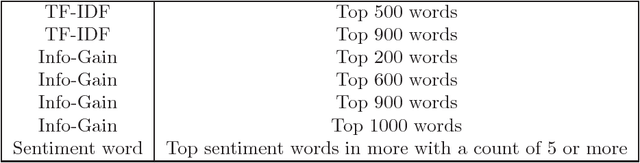
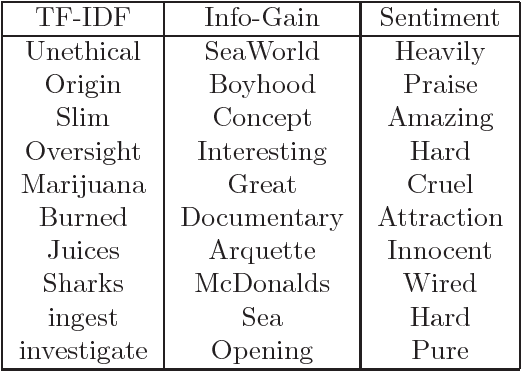
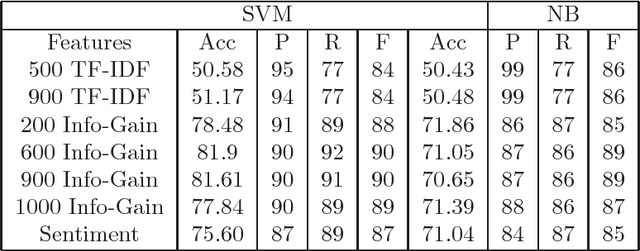
User-generated texts such as reviews and social media are valuable sources of information. Online reviews are important assets for users to buy a product, see a movie, or make a decision. Therefore, rating of a review is one of the reliable factors for all users to read and trust the reviews. This paper analyzes the texts of the reviews to evaluate and predict the ratings. Moreover, we study the effect of lexical features generated from text as well as sentimental words on the accuracy of rating prediction. Our analysis show that words with high information gain score are more efficient compared to words with high TF-IDF value. In addition, we explore the best number of features for predicting the ratings of the reviews.
* Accepted in the First International Conference on DATA ANALYTICS & LEARNING 2018 http://www.dal-conference.org/2018/acceptedPapers.html You can find this paper at the above link, paper ID: 76