 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReacting like Humans: Incorporating Intrinsic Human Behaviors into NAO through Sound-Based Reactions for Enhanced Sociability
Dec 12, 2023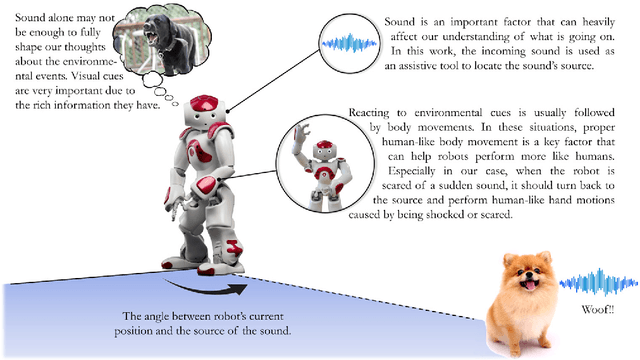

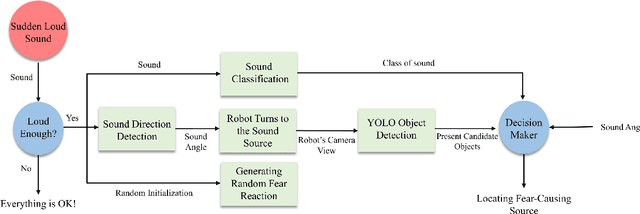
Robots' acceptability among humans and their sociability can be significantly enhanced by incorporating human-like reactions. Humans can react to environmental events very quickly and without thinking. An instance where humans display natural reactions is when they encounter a sudden and loud sound that startles or frightens them. During such moments, individuals may instinctively move their hands, turn toward the origin of the sound, and try to determine the event's cause. This inherent behavior motivated us to explore this less-studied part of social robotics. In this work, a multi-modal system composed of an action generator, sound classifier, and YOLO object detector was designed to sense the environment and, in the presence of sudden loud sounds, show natural human fear reactions, and finally, locate the fear-causing sound source in the environment. These unique and valid generated motions and inferences could imitate intrinsic human reactions and enhance the sociability of robots. For motion generation, a model based on LSTM and MDN networks was proposed to synthesize various motions. Also, in the case of sound detection, a transfer learning model was preferred that used the spectrogram of sound signals as its input. After developing individual models for sound detection, motion generation, and image recognition, they were integrated into a comprehensive fear module that was implemented on the NAO robot. Finally, the fear module was tested in practical application and two groups of experts and non-experts filled out a questionnaire to evaluate the performance of the robot. Given our promising results, this preliminary exploratory research provides a fresh perspective on social robotics and could be a starting point for modeling intrinsic human behaviors and emotions in robots.
cGAN-Based High Dimensional IMU Sensor Data Generation for Therapeutic Activities
Feb 16, 2023Human activity recognition is a core technology for applications such as rehabilitation, ambient health monitoring, and human-computer interactions. Wearable devices, particularly IMU sensors, can help us collect rich features of human movements that can be leveraged in activity recognition. Developing a robust classifier for activity recognition has always been of interest to researchers. One major problem is that there is usually a deficit of training data for some activities, making it difficult and sometimes impossible to develop a classifier. In this work, a novel GAN network called TheraGAN was developed to generate realistic IMU signals associated with a particular activity. The generated signal is of a 6-channel IMU. i.e., angular velocities and linear accelerations. Also, by introducing simple activities, which are meaningful subparts of a complex full-length activity, the generation process was facilitated for any activity with arbitrary length. To evaluate the generated signals, besides perceptual similarity metrics, they were applied along with real data to improve the accuracy of classifiers. The results show that the maximum increase in the f1-score belongs to the LSTM classifier by a 13.27% rise when generated data were added. This shows the validity of the generated data as well as TheraGAN as a tool to build more robust classifiers in case of imbalanced data problem.