 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Digital Twin for process industry using Apros simulation environment
Dec 03, 2021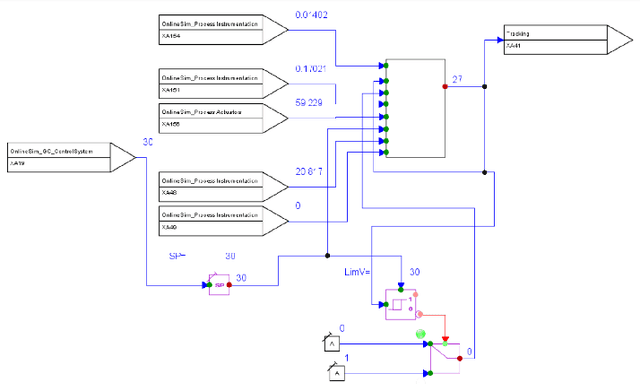
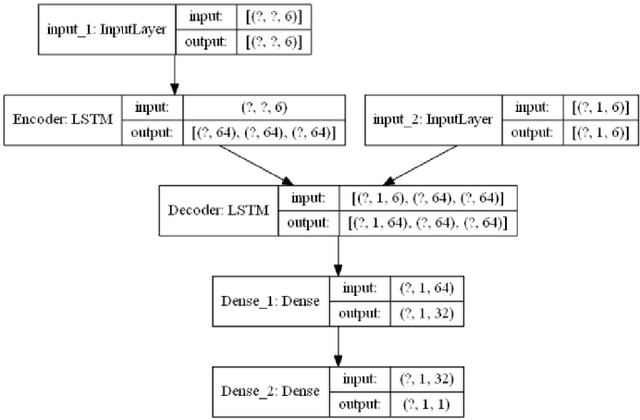
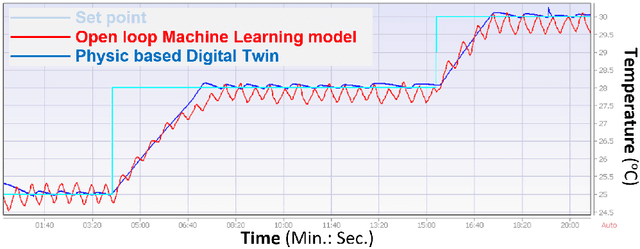
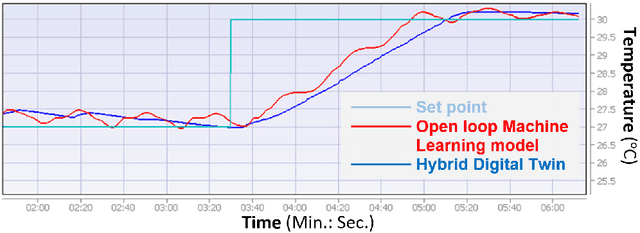
Making an updated and as-built model plays an important role in the life-cycle of a process plant. In particular, Digital Twin models must be precise to guarantee the efficiency and reliability of the systems. Data-driven models can simulate the latest behavior of the sub-systems by considering uncertainties and life-cycle related changes. This paper presents a step-by-step concept for hybrid Digital Twin models of process plants using an early implemented prototype as an example. It will detail the steps for updating the first-principles model and Digital Twin of a brownfield process system using data-driven models of the process equipment. The challenges for generation of an as-built hybrid Digital Twin will also be discussed. With the help of process history data to teach Machine Learning models, the implemented Digital Twin can be continually improved over time and this work in progress can be further optimized.
Digital Twin-Assisted Controlling of AGVs in Flexible Manufacturing Environments
Nov 05, 2021
Digital Twins are increasingly being introduced for smart manufacturing systems to improve the efficiency of the main disciplines of such systems. Formal techniques, such as graphs, are a common way of describing Digital Twin models, allowing broad types of tools to provide Digital Twin based services such as fault detection in production lines. Obtaining correct and complete formal Digital Twins of physical systems can be a complicated and time consuming process, particularly for manufacturing systems with plenty of physical objects and the associated manufacturing processes. Automatic generation of Digital Twins is an emerging research field and can reduce time and costs. In this paper, we focus on the generation of Digital Twins for flexible manufacturing systems with Automated Guided Vehicles (AGVs) on the factory floor. In particular, we propose an architectural framework and the associated design choices and software development tools that facilitate automatic generation of Digital Twins for AGVs. Specifically, the scope of the generated digital twins is controlling AGVs in the factory floor. To this end, we focus on different control levels of AGVs and utilize graph theory to generate the graph-based Digital Twin of the factory floor.
Integrating 2D and 3D Digital Plant Information Towards Automatic Generation of Digital Twins
Apr 05, 2021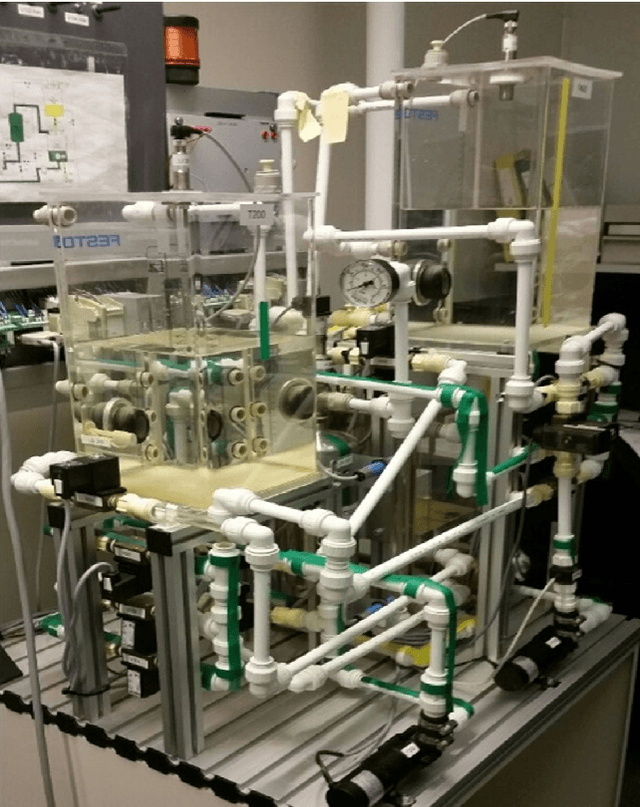
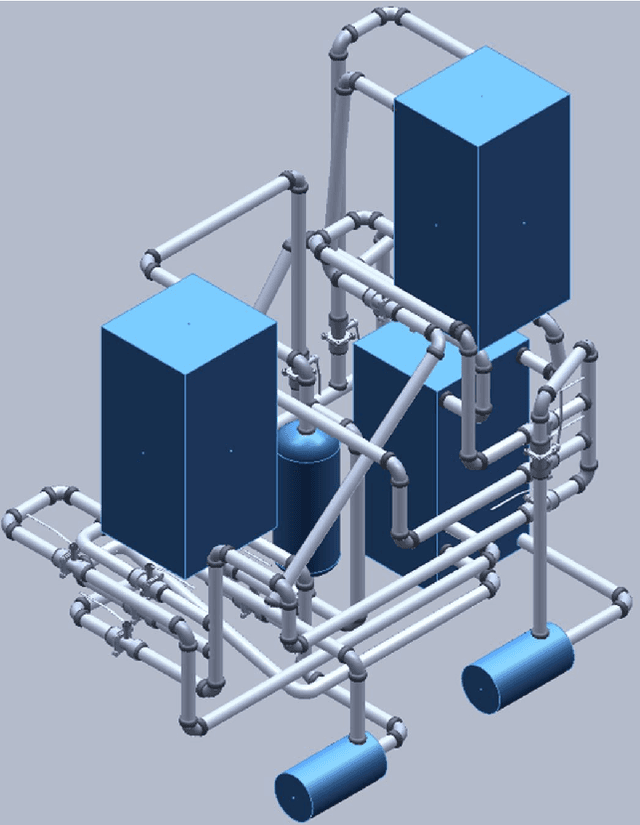
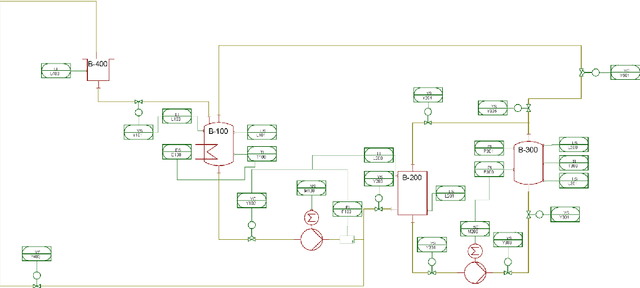
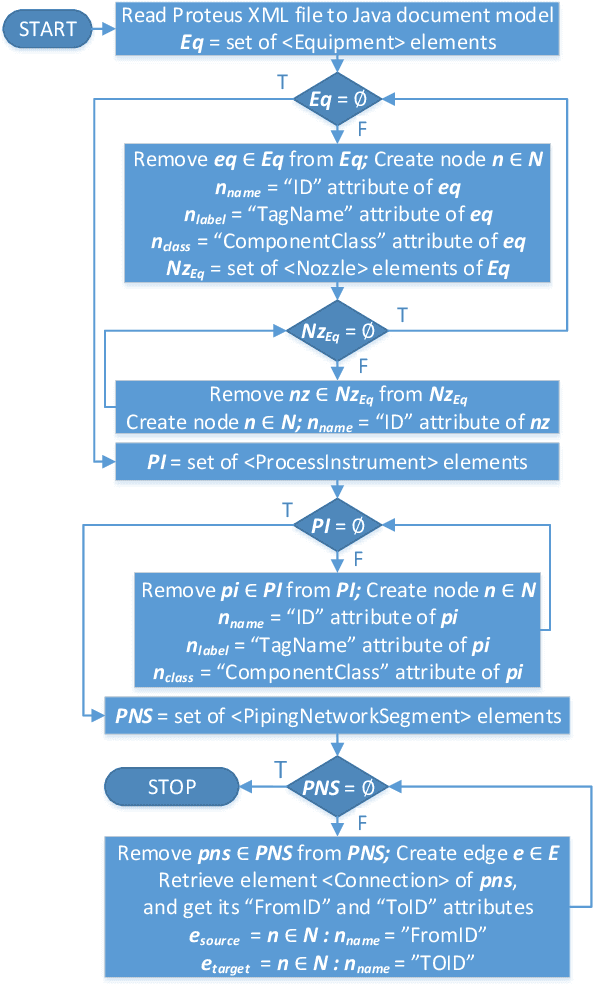
Ongoing standardization in Industry 4.0 supports tool vendor neutral representations of Piping and Instrumentation diagrams as well as 3D pipe routing. However, a complete digital plant model requires combining these two representations. 3D pipe routing information is essential for building any accurate first-principles process simulation model. Piping and instrumentation diagrams are the primary source for control loops. In order to automatically integrate these information sources to a unified digital plant model, it is necessary to develop algorithms for identifying corresponding elements such as tanks and pumps from piping and instrumentation diagrams and 3D CAD models. One approach is to raise these two information sources to a common level of abstraction and to match them at this level of abstraction. Graph matching is a potential technique for this purpose. This article focuses on automatic generation of the graphs as a prerequisite to graph matching. Algorithms for this purpose are proposed and validated with a case study. The paper concludes with a discussion of further research needed to reprocess the generated graphs in order to enable effective matching.