 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Step Deep Koopman Network (MDK-Net) for Vehicle Control in Frenet Frame
Mar 04, 2025



The highly nonlinear dynamics of vehicles present a major challenge for the practical implementation of optimal and Model Predictive Control (MPC) approaches in path planning and following. Koopman operator theory offers a global linear representation of nonlinear dynamical systems, making it a promising framework for optimization-based vehicle control. This paper introduces a novel deep learning-based Koopman modeling approach that employs deep neural networks to capture the full vehicle dynamics-from pedal and steering inputs to chassis states-within a curvilinear Frenet frame. The superior accuracy of the Koopman model compared to identified linear models is shown for a double lane change maneuver. Furthermore, it is shown that an MPC controller deploying the Koopman model provides significantly improved performance while maintaining computational efficiency comparable to a linear MPC.
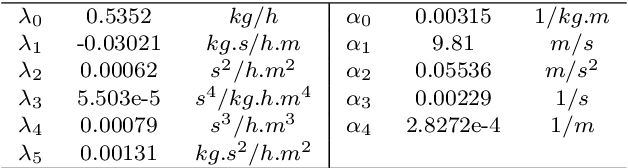
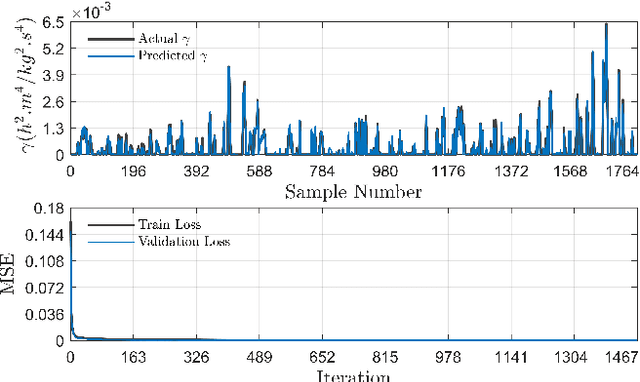
Powertrain Hybridization for Autonomous Vehicles
Sep 29, 2023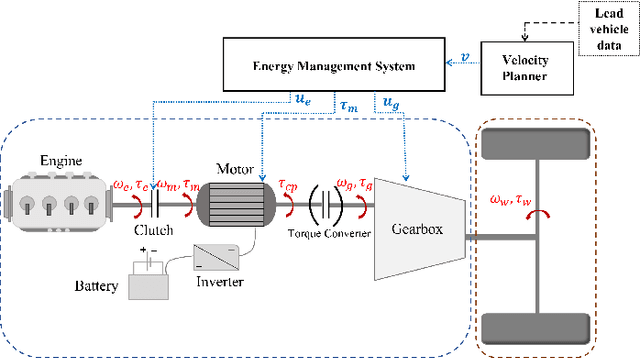



The powertrains of today's hybrid electric vehicles (HEVs) are developed for human drivers and, therefore, may not be the optimum choice for future Autonomous vehicles (AVs), given that AVs can accurately manipulate their velocity profile to avoid unnecessary energy loss. In this work, we closely examine the necessary degree of hybridization for AVs compared to human drivers by deploying real-world urban driving profiles and generating equivalent AV drive cycles in a mixed autonomy scenario. We solve the optimal energy management problem for HEVs with various motor sizes from the automotive market, and demonstrate that while human drivers typically require a motor size of around 30 kW to fully benefit from hybridization, AVs can achieve similar gains with only a 12 kW motor. This greater benefit from a smaller motor size can be attributed to a more optimal torque request, allowing for higher gains from regenerative braking and a more efficient engine operation. Furthermore, We investigate the benefits of velocity smoothing for both traditional cars and HEVs and explore the role of different mechanisms contributing to fuel consumption reduction. Our analysis reveals that velocity smoothing provides greater benefits to HEVs equipped with small motors compared to non-hybrid vehicles and HEVs with larger motors.
An Automatic Tuning MPC with Application to Ecological Cruise Control
Sep 17, 2023

Model predictive control (MPC) is a powerful tool for planning and controlling dynamical systems due to its capacity for handling constraints and taking advantage of preview information. Nevertheless, MPC performance is highly dependent on the choice of cost function tuning parameters. In this work, we demonstrate an approach for online automatic tuning of an MPC controller with an example application to an ecological cruise control system that saves fuel by using a preview of road grade. We solve the global fuel consumption minimization problem offline using dynamic programming and find the corresponding MPC cost function by solving the inverse optimization problem. A neural network fitted to these offline results is used to generate the desired MPC cost function weight during online operation. The effectiveness of the proposed approach is verified in simulation for different road geometries.