 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommunication and Energy-Aware Multi-UAV Coverage Path Planning for Networked Operations
Nov 05, 2024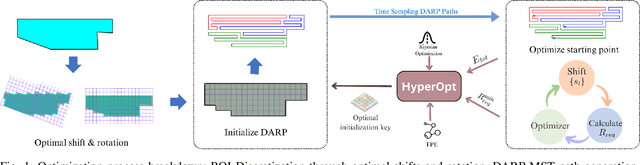
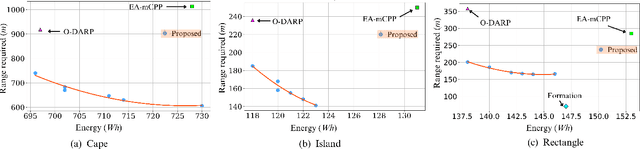


This paper presents a communication and energy-aware Multi-UAV Coverage Path Planning (mCPP) method for scenarios requiring continuous inter-UAV communication, such as cooperative search and rescue and surveillance missions. Unlike existing mCPP solutions that focus on energy, time, or coverage efficiency, our approach generates coverage paths that require minimal the communication range to maintain inter-UAV connectivity while also optimizing energy consumption. The mCPP problem is formulated as a multi-objective optimization task, aiming to minimize both the communication range requirement and energy consumption. Our approach significantly reduces the communication range needed for maintaining connectivity while ensuring energy efficiency, outperforming state-of-the-art methods. Its effectiveness is validated through simulations on complex and arbitrary shaped regions of interests, including scenarios with no-fly zones. Additionally, real-world experiment demonstrate its high accuracy, achieving 99\% consistency between the estimated and actual communication range required during a multi-UAV coverage mission involving three UAVs.
UNet: A Generic and Reliable Multi-UAV Communication and Networking Architecture for Heterogeneous Applications
Nov 05, 2024



The rapid growth of UAV applications necessitates a robust communication and networking architecture capable of addressing the diverse requirements of various applications concurrently, rather than relying on application-specific solutions. This paper proposes a generic and reliable multi-UAV communication and networking architecture designed to support the varying demands of heterogeneous applications, including short-range and long-range communication, star and mesh topologies, different data rates, and multiple wireless standards. Our architecture accommodates both adhoc and infrastructure networks, ensuring seamless connectivity throughout the network. Additionally, we present the design of a multi-protocol UAV gateway that enables interoperability among various communication protocols. Furthermore, we introduce a data processing and service layer framework with a graphical user interface of a ground control station that facilitates remote control and monitoring from any location at any time. We practically implemented the proposed architecture and evaluated its performance using different metrics, demonstrating its effectiveness.