 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeECG-Agent: On-Device Tool-Calling Agent for ECG Multi-Turn Dialogue
Jan 28, 2026Recent advances in Multimodal Large Language Models have rapidly expanded to electrocardiograms, focusing on classification, report generation, and single-turn QA tasks. However, these models fall short in real-world scenarios, lacking multi-turn conversational ability, on-device efficiency, and precise understanding of ECG measurements such as the PQRST intervals. To address these limitations, we introduce ECG-Agent, the first LLM-based tool-calling agent for multi-turn ECG dialogue. To facilitate its development and evaluation, we also present ECG-Multi-Turn-Dialogue (ECG-MTD) dataset, a collection of realistic user-assistant multi-turn dialogues for diverse ECG lead configurations. We develop ECG-Agents in various sizes, from on-device capable to larger agents. Experimental results show that ECG-Agents outperform baseline ECG-LLMs in response accuracy. Furthermore, on-device agents achieve comparable performance to larger agents in various evaluations that assess response accuracy, tool-calling ability, and hallucinations, demonstrating their viability for real-world applications.
Dynamic Policy Learning for Legged Robot with Simplified Model Pretraining and Model Homotopy Transfer
Dec 31, 2025Generating dynamic motions for legged robots remains a challenging problem. While reinforcement learning has achieved notable success in various legged locomotion tasks, producing highly dynamic behaviors often requires extensive reward tuning or high-quality demonstrations. Leveraging reduced-order models can help mitigate these challenges. However, the model discrepancy poses a significant challenge when transferring policies to full-body dynamics environments. In this work, we introduce a continuation-based learning framework that combines simplified model pretraining and model homotopy transfer to efficiently generate and refine complex dynamic behaviors. First, we pretrain the policy using a single rigid body model to capture core motion patterns in a simplified environment. Next, we employ a continuation strategy to progressively transfer the policy to the full-body environment, minimizing performance loss. To define the continuation path, we introduce a model homotopy from the single rigid body model to the full-body model by gradually redistributing mass and inertia between the trunk and legs. The proposed method not only achieves faster convergence but also demonstrates superior stability during the transfer process compared to baseline methods. Our framework is validated on a range of dynamic tasks, including flips and wall-assisted maneuvers, and is successfully deployed on a real quadrupedal robot.
Online Friction Coefficient Identification for Legged Robots on Slippery Terrain Using Smoothed Contact Gradients
Feb 24, 2025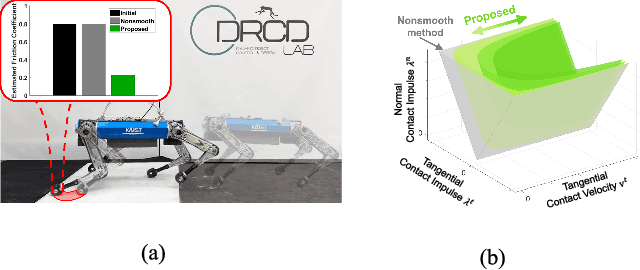
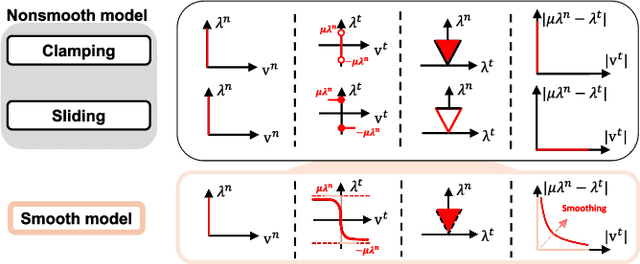
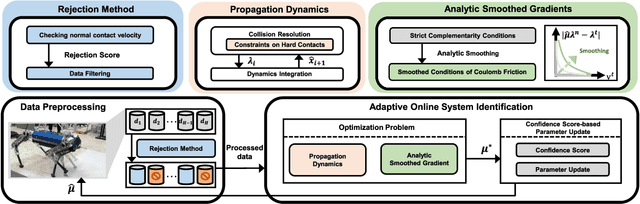
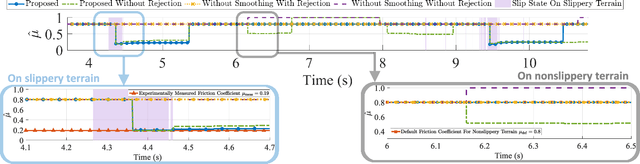
This paper proposes an online friction coefficient identification framework for legged robots on slippery terrain. The approach formulates the optimization problem to minimize the sum of residuals between actual and predicted states parameterized by the friction coefficient in rigid body contact dynamics. Notably, the proposed framework leverages the analytic smoothed gradient of contact impulses, obtained by smoothing the complementarity condition of Coulomb friction, to solve the issue of non-informative gradients induced from the nonsmooth contact dynamics. Moreover, we introduce the rejection method to filter out data with high normal contact velocity following contact initiations during friction coefficient identification for legged robots. To validate the proposed framework, we conduct the experiments using a quadrupedal robot platform, KAIST HOUND, on slippery and nonslippery terrain. We observe that our framework achieves fast and consistent friction coefficient identification within various initial conditions.
* 8 pages, IEEE RA-L (2025) accepted