 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Live Programming in ROS with PhaROS and LRP
Dec 15, 2014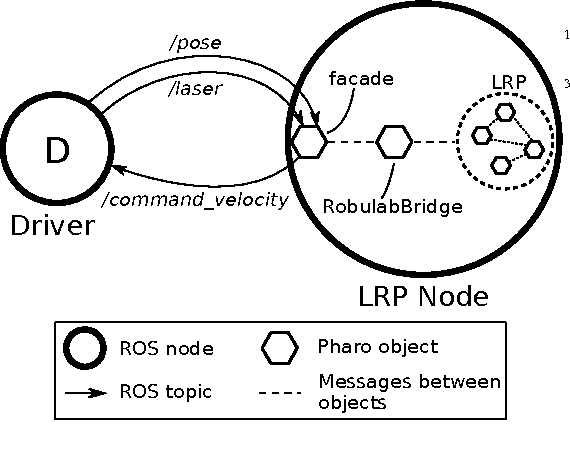
In traditional robot behavior programming, the edit-compile-simulate-deploy-run cycle creates a large mental disconnect between program creation and eventual robot behavior. This significantly slows down behavior development because there is no immediate mental connection between the program and the resulting behavior. With live programming the development cycle is made extremely tight, realizing such an immediate connection. In our work on programming of ROS robots in a more dynamic fashion through PhaROS, we have experimented with the use of the Live Robot Programming language. This has given rise to a number of requirements for such live programming of robots. In this text we introduce these requirements and illustrate them using an example robot behavior.