 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time, accurate, and open source upper-limb musculoskeletal analysis using a single RGBD camera
Jun 14, 2024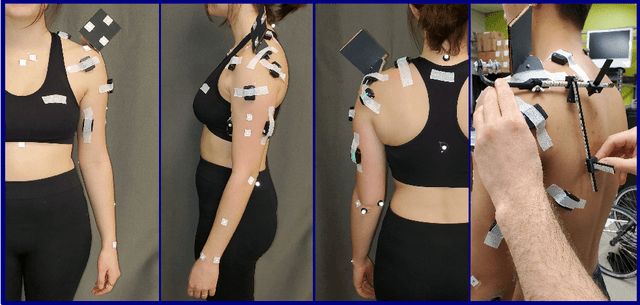
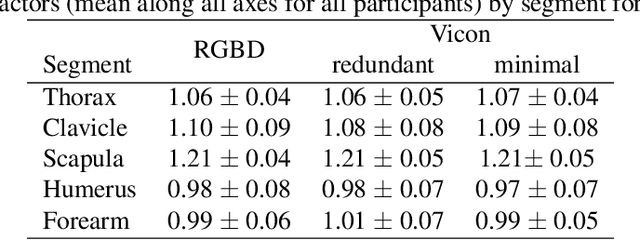
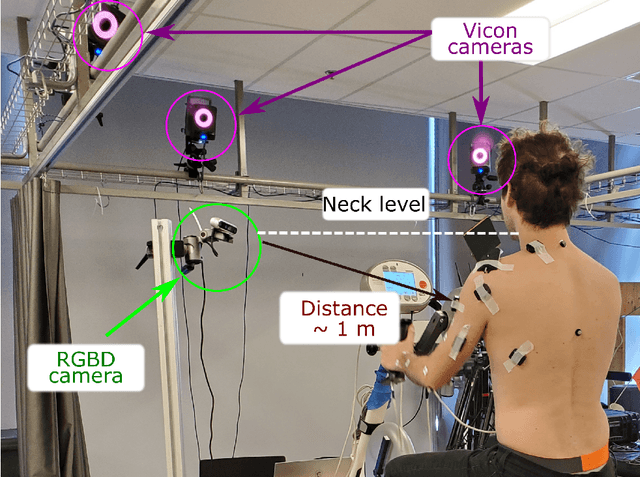
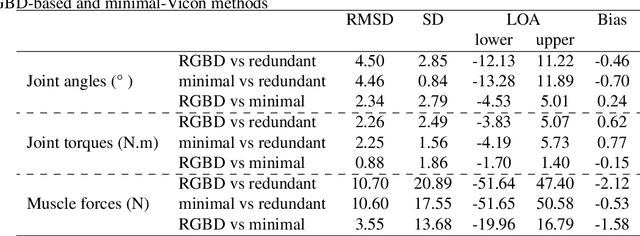
Biomechanical biofeedback may enhance rehabilitation and provide clinicians with more objective task evaluation. These feedbacks often rely on expensive motion capture systems, which restricts their widespread use, leading to the development of computer vision-based methods. These methods are subject to large joint angle errors, considering the upper limb, and exclude the scapula and clavicle motion in the analysis. Our open-source approach offers a user-friendly solution for high-fidelity upper-limb kinematics using a single low-cost RGBD camera and includes semi-automatic skin marker labeling. Real-time biomechanical analysis, ranging from kinematics to muscle force estimation, was conducted on eight participants performing a hand-cycling motion to demonstrate the applicability of our approach on the upper limb. Markers were recorded by the RGBD camera and an optoelectronic camera system, considered as a reference. Muscle activity and external load were recorded using eight EMG and instrumented hand pedals, respectively. Bland-Altman analysis revealed significant agreements in the 3D markers' positions between the two motion capture methods, with errors averaging 3.3$\pm$3.9 mm. For the biomechanical analysis, the level of agreement was sensitive to whether the same marker set was used. For example, joint angle differences averaging 2.3$\pm$2.8{\deg} when using the same marker set, compared to 4.5$\pm$2.9{\deg} otherwise. Biofeedback from the RGBD camera was provided at 63 Hz. Our study introduces a novel method for using an RGBD camera as a low-cost motion capture solution, emphasizing its potential for accurate kinematic reconstruction and comprehensive upper-limb biomechanical studies.
The interplay of fatigue dynamics and task achievement using optimal control predictive simulation
Jun 13, 2023Predictive simulation of human motion could provide insight into optimal techniques. In repetitive or long-duration tasks, these simulations must predict fatigue-induced adaptation. However, most studies minimize cost function terms related to actuator activations, assuming it minimizes fatigue. An additional modeling layer is needed to consider the previous use of muscles to reveal adaptive strategies to the decreased force production capability. Here, we propose interfacing Xia's three-compartment fatigue dynamics model with rigid-body dynamics. A stabilization invariant was added to Xia's model. We simulated the maximum repetition of dumbbell biceps curls as an optimal control problem (OCP) using direct multiple shooting. We explored three cost functions (minimizing minimum torque, fatigue, or both) and two OCP formulations (full-horizon and sliding-horizon approaches). We found that Xia's model modified with the stabilization invariant (10 or 5) was adapted to direct multiple shooting. Sliding-horizon OCPs achieved 20 to 21 repetitions. The kinematic strategy slowly deviated from a plausible dumbbell lifting task to a swinging strategy as fatigue onset increasingly compromised the ability to keep the arm vertical. In full-horizon OCPs, the latter kinematic strategy was used over the whole motion, resulting in 32 repetitions. We showed that sliding-horizon OCPs revealed a reactive strategy to fatigue when only torque was included in the cost function, whereas an anticipatory strategy was revealed when the fatigue term was included in the cost function. Overall, the proposed approach has the potential to be a valuable tool in optimizing performance and helping reduce fatigue-related injuries in a variety of fields.