 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizations for Decision Making and Planning in Description Logic Dynamic Knowledge Bases
May 04, 2015
Artifact-centric models for business processes recently raised a lot of attention, as they manage to combine structural (i.e. data related) with dynamical (i.e. process related) aspects in a seamless way. Many frameworks developed under this approach, although, are not built explicitly for planning, one of the most prominent operations related to business processes. In this paper, we try to overcome this by proposing a framework named Dynamic Knowledge Bases, aimed at describing rich business domains through Description Logic-based ontologies, and where a set of actions allows the system to evolve by modifying such ontologies. This framework, by offering action rewriting and knowledge partialization, represents a viable and formal environment to develop decision making and planning techniques for DL-based artifact-centric business domains.
Backwards State-space Reduction for Planning in Dynamic Knowledge Bases
Jul 30, 2014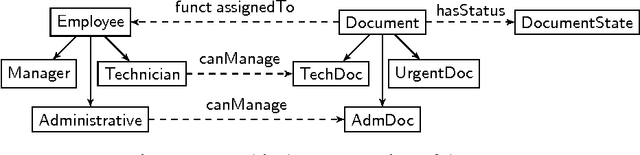
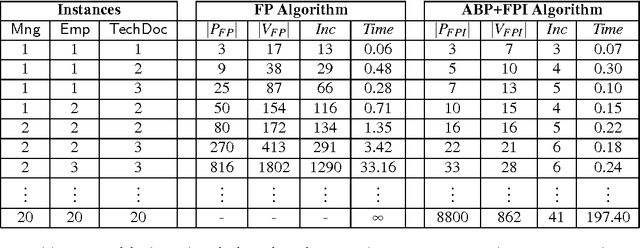
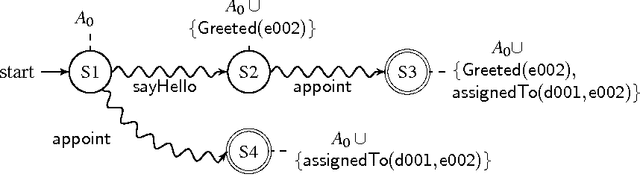
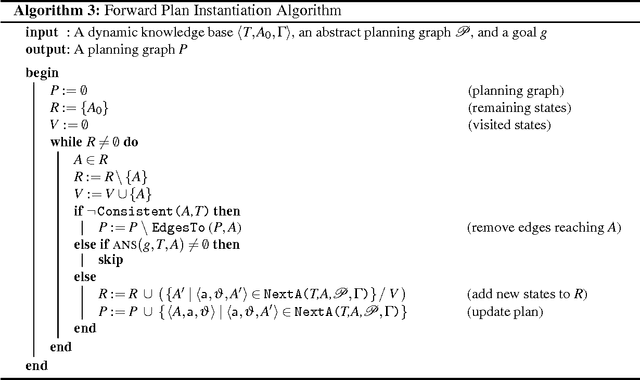
In this paper we address the problem of planning in rich domains, where knowledge representation is a key aspect for managing the complexity and size of the planning domain. We follow the approach of Description Logic (DL) based Dynamic Knowledge Bases, where a state of the world is represented concisely by a (possibly changing) ABox and a (fixed) TBox containing the axioms, and actions that allow to change the content of the ABox. The plan goal is given in terms of satisfaction of a DL query. In this paper we start from a traditional forward planning algorithm and we propose a much more efficient variant by combining backward and forward search. In particular, we propose a Backward State-space Reduction technique that consists in two phases: first, an Abstract Planning Graph P is created by using the Abstract Backward Planning Algorithm (ABP), then the abstract planning graph P is instantiated into a corresponding planning graph P by using the Forward Plan Instantiation Algorithm (FPI). The advantage is that in the preliminary ABP phase we produce a symbolic plan that is a pattern to direct the search of the concrete plan. This can be seen as a kind of informed search where the preliminary backward phase is useful to discover properties of the state-space that can be used to direct the subsequent forward phase. We evaluate the effectiveness of our ABP+FPI algorithm in the reduction of the explored planning domain by comparing it to a standard forward planning algorithm and applying both of them to a concrete business case study.
* In Proceedings GRAPHITE 2014, arXiv:1407.7671