 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBackwards State-space Reduction for Planning in Dynamic Knowledge Bases
Paper and Code
Jul 30, 2014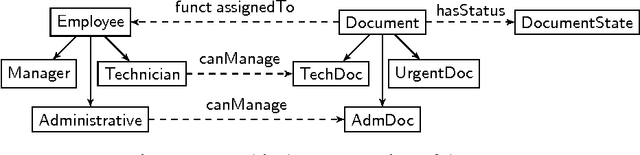
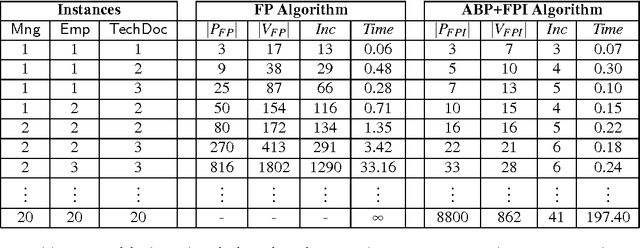
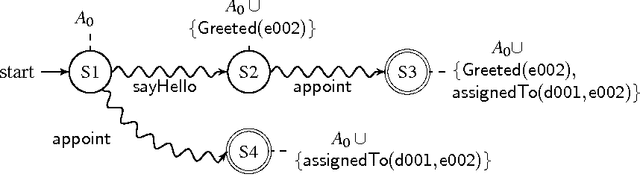
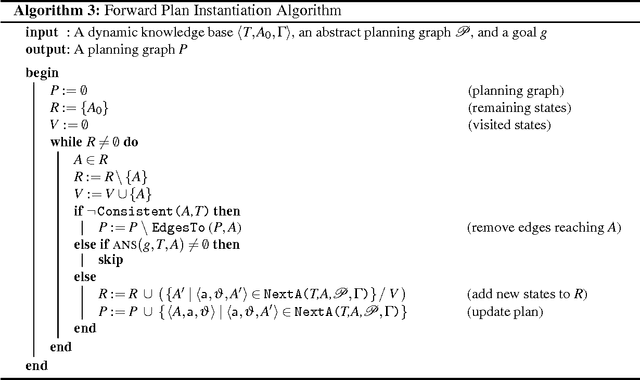
In this paper we address the problem of planning in rich domains, where knowledge representation is a key aspect for managing the complexity and size of the planning domain. We follow the approach of Description Logic (DL) based Dynamic Knowledge Bases, where a state of the world is represented concisely by a (possibly changing) ABox and a (fixed) TBox containing the axioms, and actions that allow to change the content of the ABox. The plan goal is given in terms of satisfaction of a DL query. In this paper we start from a traditional forward planning algorithm and we propose a much more efficient variant by combining backward and forward search. In particular, we propose a Backward State-space Reduction technique that consists in two phases: first, an Abstract Planning Graph P is created by using the Abstract Backward Planning Algorithm (ABP), then the abstract planning graph P is instantiated into a corresponding planning graph P by using the Forward Plan Instantiation Algorithm (FPI). The advantage is that in the preliminary ABP phase we produce a symbolic plan that is a pattern to direct the search of the concrete plan. This can be seen as a kind of informed search where the preliminary backward phase is useful to discover properties of the state-space that can be used to direct the subsequent forward phase. We evaluate the effectiveness of our ABP+FPI algorithm in the reduction of the explored planning domain by comparing it to a standard forward planning algorithm and applying both of them to a concrete business case study.