 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultimodal Visual-haptic pose estimation in the presence of transient occlusion
Jun 27, 2024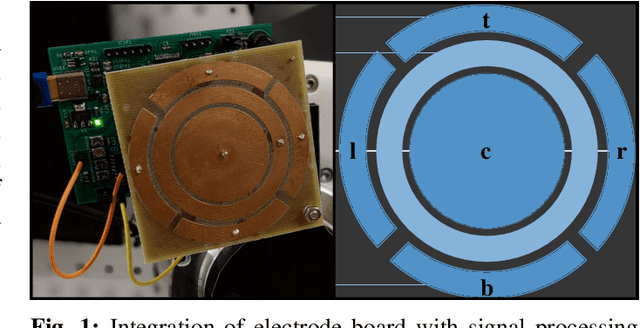



Human-robot collaboration requires the establishment of methods to guarantee the safety of participating operators. A necessary part of this process is ensuring reliable human pose estimation. Established vision-based modalities encounter problems when under conditions of occlusion. This article describes the combination of two perception modalities for pose estimation in environments containing such transient occlusion. We first introduce a vision-based pose estimation method, based on a deep Predictive Coding (PC) model featuring robustness to partial occlusion. Next, capacitive sensing hardware capable of detecting various objects is introduced. The sensor is compact enough to be mounted on the exterior of any given robotic system. The technology is particularly well-suited to detection of capacitive material, such as living tissue. Pose estimation from the two individual sensing modalities is combined using a modified Luenberger observer model. We demonstrate that the results offer better performance than either sensor alone. The efficacy of the system is demonstrated on an environment containing a robot arm and a human, showing the ability to estimate the pose of a human forearm under varying levels of occlusion.
Behavioral Manifolds: Representing the Landscape of Grasp Affordances in the Relative Pose Space
May 07, 2024The use of machine learning to investigate grasp affordances has received extensive attention over the past several decades. The existing literature provides a robust basis to build upon, though a number of aspects may be improved. Results commonly work in terms of grasp configuration, with little consideration for the manner in which the grasp may be (re-)produced from a reachability and trajectory planning perspective. In addition, the majority of existing learning approaches focus of producing a single viable grasp, offering little transparency on how the result was reached, or insights on its robustness. We propose a different perspective on grasp affordance learning, explicitly accounting for grasp synthesis; that is, the manner in which manipulator kinematics are used to allow materialization of grasps. The approach allows to explicitly map the grasp policy space in terms of generated grasp types and associated grasp quality. Results of numerical simulations illustrate merit of the method and highlight the manner in which it may promote a greater degree of explainability for otherwise intransparent reinforcement processes.
ProcNet: Deep Predictive Coding Model for Robust-to-occlusion Visual Segmentation and Pose Estimation
Oct 27, 2023Systems involving human-robot collaboration necessarily require that steps be taken to ensure safety of the participating human. This is usually achievable if accurate, reliable estimates of the human's pose are available. In this paper, we present a deep Predictive Coding (PC) model supporting visual segmentation, which we extend to pursue pose estimation. The model is designed to offer robustness to the type of transient occlusion naturally occurring when human and robot are operating in close proximity to one another. Impact on performance of relevant model parameters is assessed, and comparison to an alternate pose estimation model (NVIDIA's PoseCNN) illustrates efficacy of the proposed approach.
Penalty-based Numerical Representation of Rigid Body Interactions with Applications to Simulation of Robotic Grasping
Aug 01, 2021



This paper presents a novel approach to numerically describe the interactions between rigid bodies, with a special focus on robotic grasping. Some of the more common approaches used to address such issues rely on satisfaction of a set of strict constraints, descriptive of the expected physical reality of such interactions in practice. However, application of constraint-based methods in a numerical setting may lead to problematic configurations in which, for instance, volumes occupied by distinct bodies may overlap. Such situations lying beyond the range of admissible configurations for constraint-based methods, their occurrence typically results in non-meaningful simulation outcomes. We propose a method which acknowledges the possibility of such occurrences while demoting their occurrence. This is pursued through the use of a penalty-based approach, and draws on notions of mechanical impedance to infer apposite reaction forces. Results of numerical simulations illustrate efficacy of the proposed approach.