 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Note on the Time Complexity of Using Subdivision Methods for the Approximation of Fibers
Mar 03, 2025Subdivision methods such as quadtrees, octrees, and higher-dimensional orthrees are standard practice in different domains of computer science. We can use these methods to represent given geometries, such as curves, meshes, or surfaces. This representation is achieved by splitting some bounding voxel recursively while further splitting only sub-voxels that intersect with the given geometry. It is fairly known that subdivision methods are more efficient than traversing a fine-grained voxel grid. In this short note, we propose another outlook on analyzing the construction time complexity of orthrees to represent implicitly defined geometries that are fibers (preimages) of some function. This complexity is indeed asymptotically better than traversing dense voxel grids, under certain conditions, which we specify in the note. In fact, the complexity is output sensitive, and is closely related to the Hausdorff measure and Hausdorff dimension of the resulting geometry.
Localization in Dynamic Planar Environments Using Few Distance Measurements
Jul 03, 2024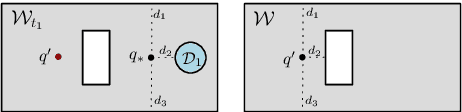
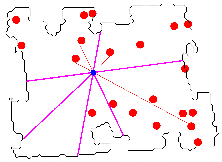
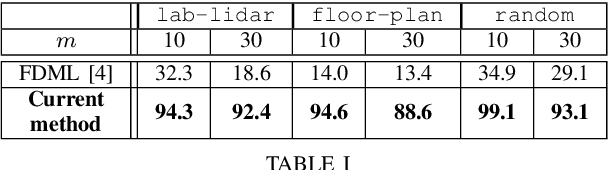
We present a method for determining the unknown location of a sensor placed in a known 2D environment in the presence of unknown dynamic obstacles, using only few distance measurements. We present guarantees on the quality of the localization, which are robust under mild assumptions on the density of the unknown/dynamic obstacles in the known environment. We demonstrate the effectiveness of our method in simulated experiments for different environments and varying dynamic-obstacle density. Our open source software is available at https://github.com/TAU-CGL/vb-fdml2-public.