 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Probabilistic Graphical Model Foundation for Enabling Predictive Digital Twins at Scale
Dec 10, 2020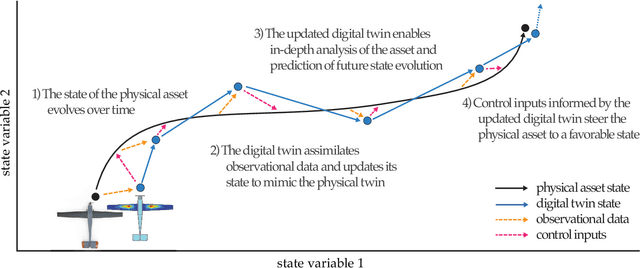
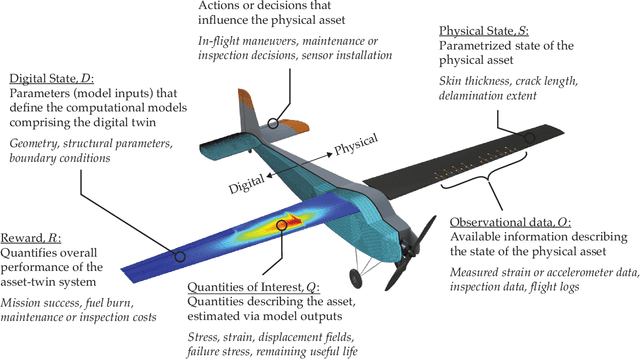
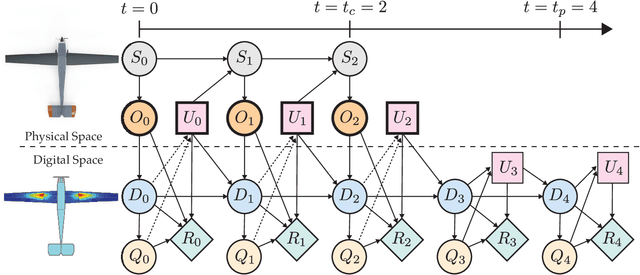
A unifying mathematical formulation is needed to move from one-off digital twins built through custom implementations to robust digital twin implementations at scale. This work proposes a probabilistic graphical model as a formal mathematical representation of a digital twin and its associated physical asset. We create an abstraction of the asset-twin system as a set of coupled dynamical systems, evolving over time through their respective state-spaces and interacting via observed data and control inputs. The formal definition of this coupled system as a probabilistic graphical model enables us to draw upon well-established theory and methods from Bayesian statistics, dynamical systems, and control theory. The declarative and general nature of the proposed digital twin model make it rigorous yet flexible, enabling its application at scale in a diverse range of application areas. We demonstrate how the model is instantiated as a Bayesian network to create a structural digital twin of an unmanned aerial vehicle. The graphical model foundation ensures that the digital twin creation and updating process is principled, repeatable, and able to scale to the calibration of an entire fleet of digital twins.
From Physics-Based Models to Predictive Digital Twins via Interpretable Machine Learning
Apr 28, 2020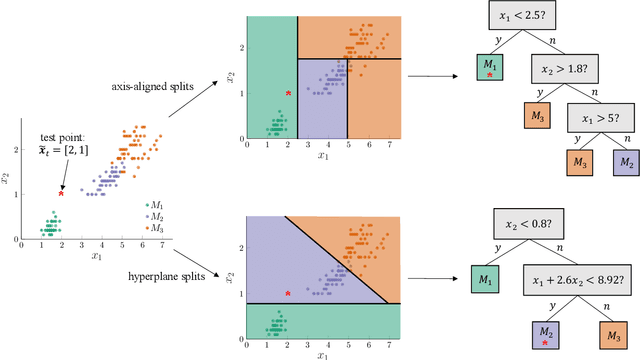
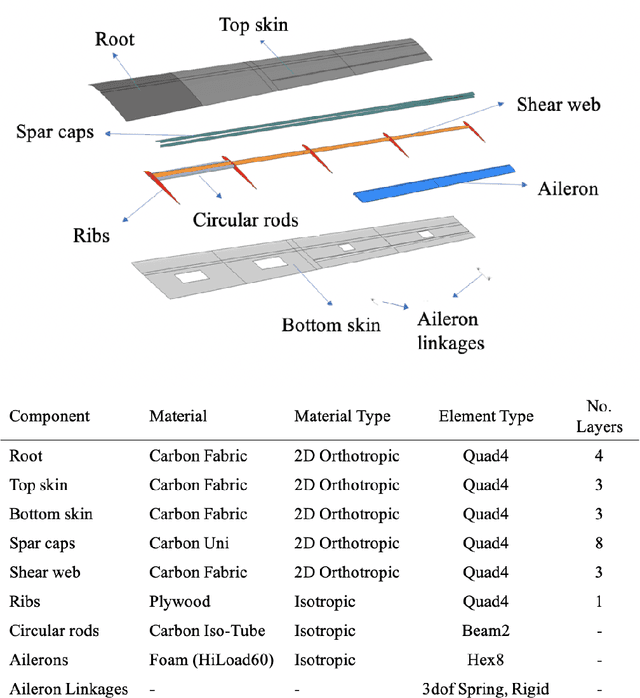
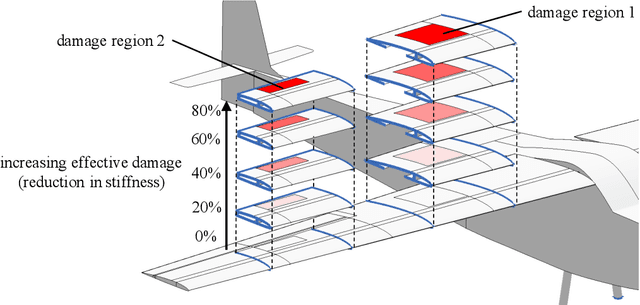
This work develops a methodology for creating a data-driven digital twin from a library of physics-based models representing various asset states. The digital twin is updated using interpretable machine learning. Specifically, we use optimal trees---a recently developed scalable machine learning method---to train an interpretable data-driven classifier. Training data for the classifier are generated offline using simulated scenarios solved by the library of physics-based models. These data can be further augmented using experimental or other historical data. In operation, the classifier uses observational data from the asset to infer which physics-based models in the model library are the best candidates for the updated digital twin. The approach is demonstrated through the development of a structural digital twin for a 12ft wingspan unmanned aerial vehicle. This digital twin is built from a library of reduced-order models of the vehicle in a range of structural states. The data-driven digital twin dynamically updates in response to structural damage or degradation and enables the aircraft to replan a safe mission accordingly. Within this context, we study the performance of the optimal tree classifiers and demonstrate how their interpretability enables explainable structural assessments from sparse sensor measurements, and also informs optimal sensor placement.