 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepPicarMicro: Applying TinyML to Autonomous Cyber Physical Systems
Aug 23, 2022
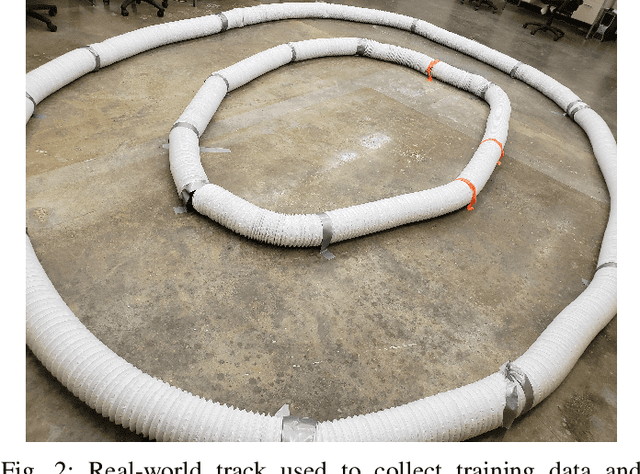
Running deep neural networks (DNNs) on tiny Micro-controller Units (MCUs) is challenging due to their limitations in computing, memory, and storage capacity. Fortunately, recent advances in both MCU hardware and machine learning software frameworks make it possible to run fairly complex neural networks on modern MCUs, resulting in a new field of study widely known as TinyML. However, there have been few studies to show the potential for TinyML applications in cyber physical systems (CPS). In this paper, we present DeepPicarMicro, a small self-driving RC car testbed, which runs a convolutional neural network (CNN) on a Raspberry Pi Pico MCU. We apply a state-of-the-art DNN optimization to successfully fit the well-known PilotNet CNN architecture, which was used to drive NVIDIA's real self-driving car, on the MCU. We apply a state-of-art network architecture search (NAS) approach to find further optimized networks that can effectively control the car in real-time in an end-to-end manner. From an extensive systematic experimental evaluation study, we observe an interesting relationship between the accuracy, latency, and control performance of a system. From this, we propose a joint optimization strategy that takes both accuracy and latency of a model in the network architecture search process for AI enabled CPS.