 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGKAN: Graph Kolmogorov-Arnold Networks
Jun 10, 2024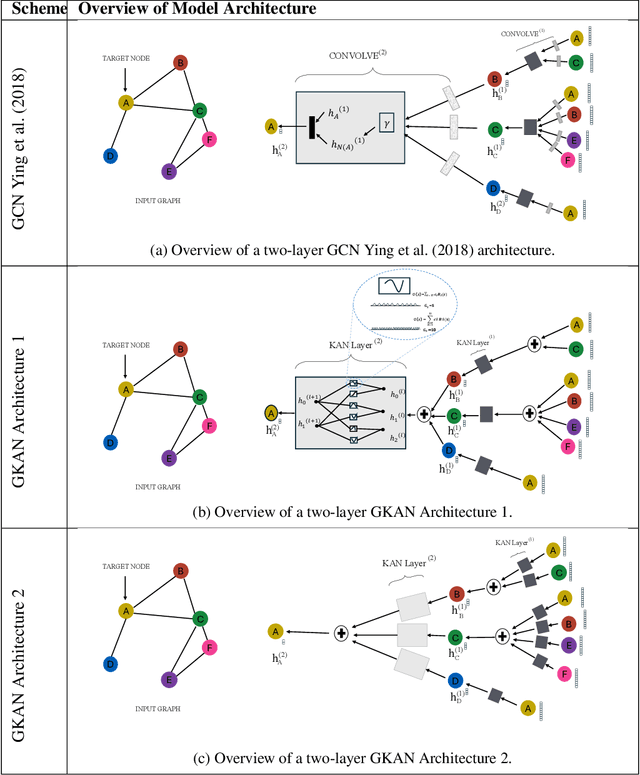
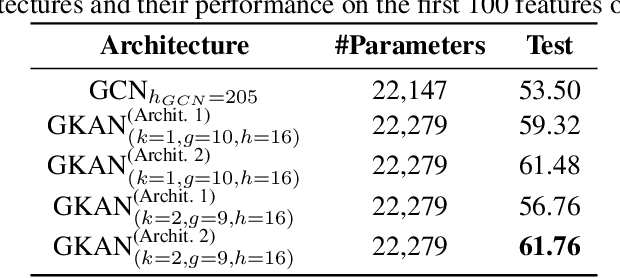
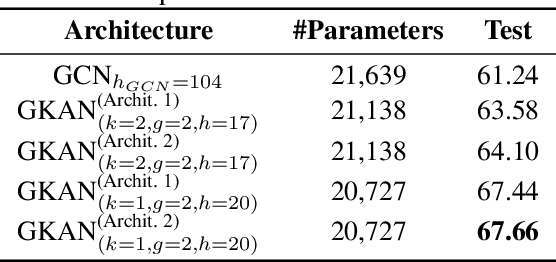

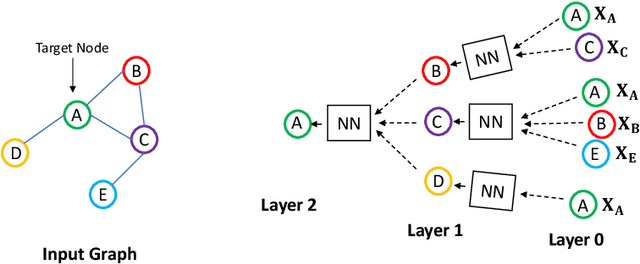
We introduce Graph Kolmogorov-Arnold Networks (GKAN), an innovative neural network architecture that extends the principles of the recently proposed Kolmogorov-Arnold Networks (KAN) to graph-structured data. By adopting the unique characteristics of KANs, notably the use of learnable univariate functions instead of fixed linear weights, we develop a powerful model for graph-based learning tasks. Unlike traditional Graph Convolutional Networks (GCNs) that rely on a fixed convolutional architecture, GKANs implement learnable spline-based functions between layers, transforming the way information is processed across the graph structure. We present two different ways to incorporate KAN layers into GKAN: architecture 1 -- where the learnable functions are applied to input features after aggregation and architecture 2 -- where the learnable functions are applied to input features before aggregation. We evaluate GKAN empirically using a semi-supervised graph learning task on a real-world dataset (Cora). We find that architecture generally performs better. We find that GKANs achieve higher accuracy in semi-supervised learning tasks on graphs compared to the traditional GCN model. For example, when considering 100 features, GCN provides an accuracy of 53.5 while a GKAN with a comparable number of parameters gives an accuracy of 61.76; with 200 features, GCN provides an accuracy of 61.24 while a GKAN with a comparable number of parameters gives an accuracy of 67.66. We also present results on the impact of various parameters such as the number of hidden nodes, grid-size, and the polynomial-degree of the spline on the performance of GKAN.
GCNScheduler: Scheduling Distributed Computing Applications using Graph Convolutional Networks
Oct 22, 2021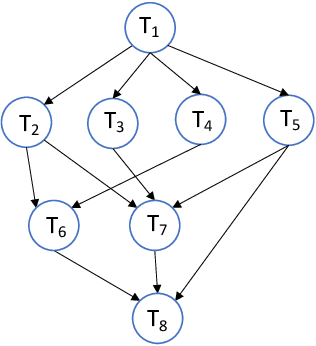

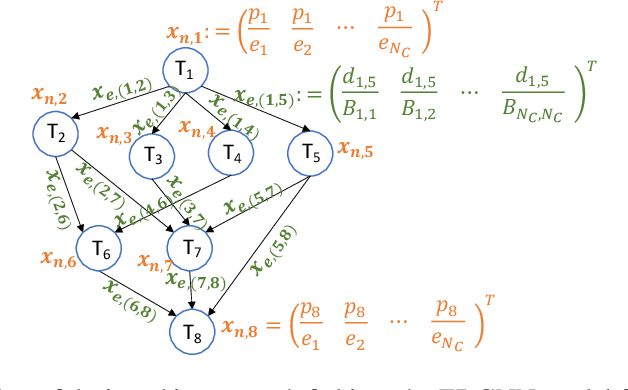
We consider the classical problem of scheduling task graphs corresponding to complex applications on distributed computing systems. A number of heuristics have been previously proposed to optimize task scheduling with respect to metrics such as makespan and throughput. However, they tend to be slow to run, particularly for larger problem instances, limiting their applicability in more dynamic systems. Motivated by the goal of solving these problems more rapidly, we propose, for the first time, a graph convolutional network-based scheduler (GCNScheduler). By carefully integrating an inter-task data dependency structure with network settings into an input graph and feeding it to an appropriate GCN, the GCNScheduler can efficiently schedule tasks of complex applications for a given objective. We evaluate our scheme with baselines through simulations. We show that not only can our scheme quickly and efficiently learn from existing scheduling schemes, but also it can easily be applied to large-scale settings where current scheduling schemes fail to handle. We show that it achieves better makespan than the classic HEFT algorithm, and almost the same throughput as throughput-oriented HEFT (TP-HEFT), while providing several orders of magnitude faster scheduling times in both cases. For example, for makespan minimization, GCNScheduler schedules 50-node task graphs in about 4 milliseconds while HEFT takes more than 1500 seconds; and for throughput maximization, GCNScheduler schedules 100-node task graphs in about 3.3 milliseconds, compared to about 6.9 seconds for TP-HEFT.