 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimplified Active Calibration
Jul 25, 2018



We present a new mathematical formulation to estimate the intrinsic parameters of a camera in active or robotic platforms. We show that the focal lengths can be estimated using only one point correspondence that relates images taken before and after a degenerate rotation of the camera. The estimated focal lengths are then treated as known parameters to obtain a linear set of equations to calculate the principal point. Assuming that the principal point is close to the image center, the accuracy of the linear equations are increased by integrating the image center into the formulation. We extensively evaluate the formulations on a simulated camera, 3D scenes and real-world images. Our error analysis over simulated and real images indicates that the proposed Simplified Active Calibration method estimates the parameters of a camera with low error rates that can be used as an initial guess for further non-linear refinement procedures. Simplified Active Calibration can be employed in real-time environments for automatic calibrations given the proposed closed-form solutions.
IVUS-Net: An Intravascular Ultrasound Segmentation Network
Jun 14, 2018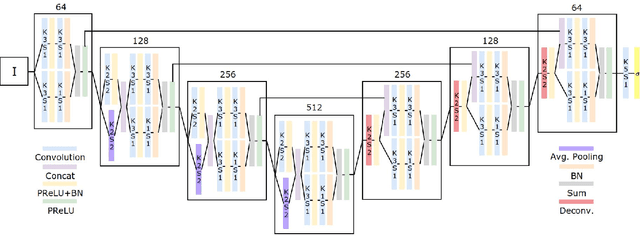
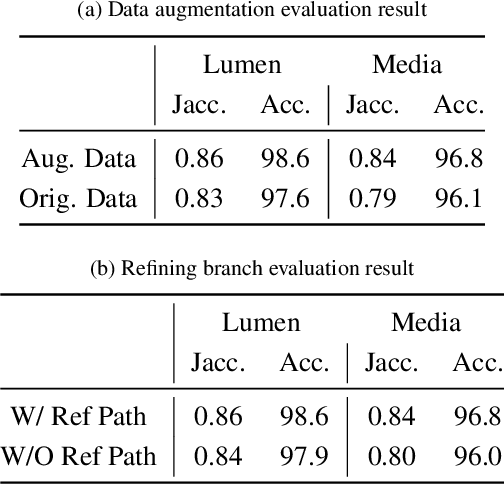
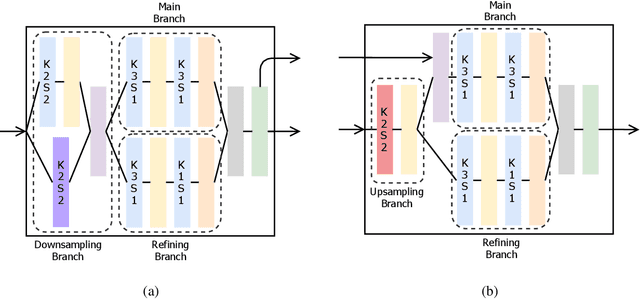
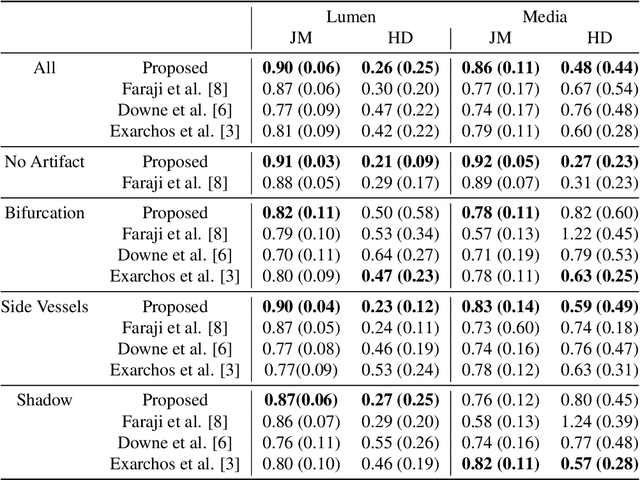
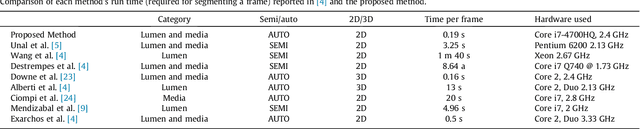
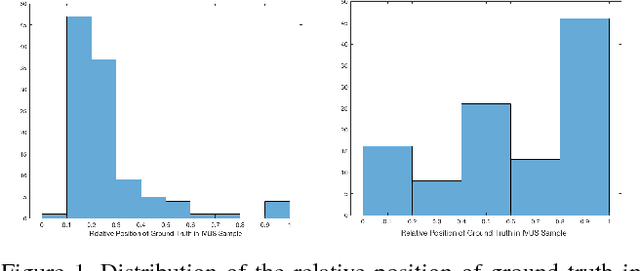
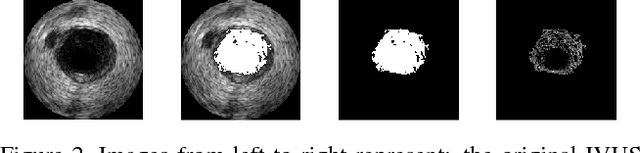
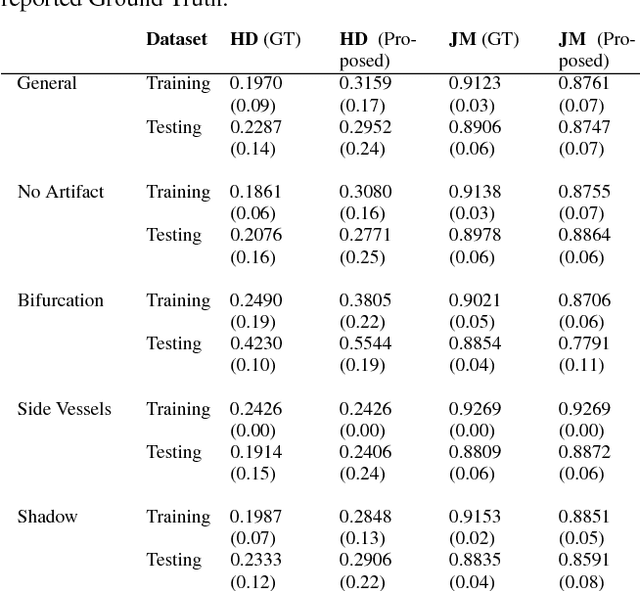
IntraVascular UltraSound (IVUS) is one of the most effective imaging modalities that provides assistance to experts in order to diagnose and treat cardiovascular diseases. We address a central problem in IVUS image analysis with Fully Convolutional Network (FCN): automatically delineate the lumen and media-adventitia borders in IVUS images, which is crucial to shorten the diagnosis process or benefits a faster and more accurate 3D reconstruction of the artery. Particularly, we propose an FCN architecture, called IVUS-Net, followed by a post-processing contour extraction step, in order to automatically segments the interior (lumen) and exterior (media-adventitia) regions of the human arteries. We evaluated our IVUS-Net on the test set of a standard publicly available dataset containing 326 IVUS B-mode images with two measurements, namely Jaccard Measure (JM) and Hausdorff Distances (HD). The evaluation result shows that IVUS-Net outperforms the state-of-the-art lumen and media segmentation methods by 4% to 20% in terms of HD distance. IVUS-Net performs well on images in the test set that contain a significant amount of major artifacts such as bifurcations, shadows, and side branches that are not common in the training set. Furthermore, using a modern GPU, IVUS-Net segments each IVUS frame only in 0.15 seconds. The proposed work, to the best of our knowledge, is the first deep learning based method for segmentation of both the lumen and the media vessel walls in 20 MHz IVUS B-mode images that achieves the best results without any manual intervention. Code is available at https://github.com/Kulbear/ivus-segmentation-icsm2018
Segmentation of Arterial Walls in Intravascular Ultrasound Cross-Sectional Images Using Extremal Region Selection
Jun 10, 2018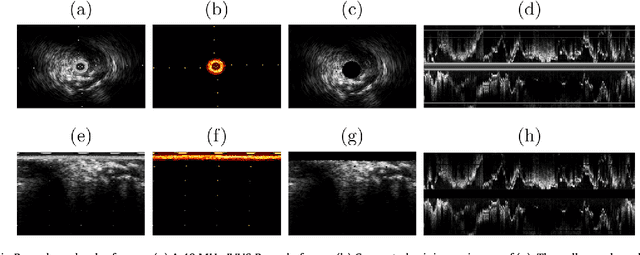
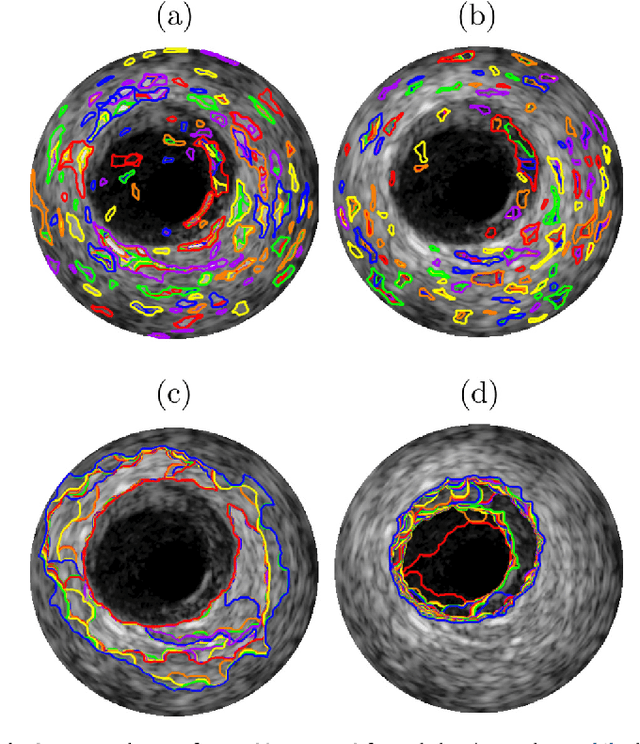
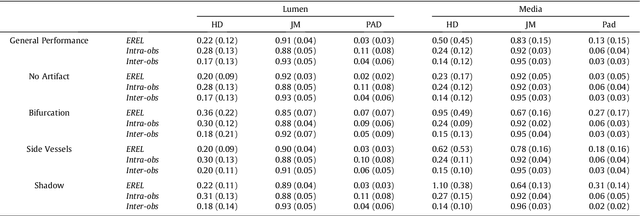
Intravascular Ultrasound (IVUS) is an intra-operative imaging modality that facilitates observing and appraising the vessel wall structure of the human coronary arteries. Segmentation of arterial wall boundaries from the IVUS images is not only crucial for quantitative analysis of the vessel walls and plaque characteristics, but is also necessary for generating 3D reconstructed models of the artery. The aim of this study is twofold. Firstly, we investigate the feasibility of using a recently proposed region detector, namely Extremal Region of Extremum Level (EREL) to delineate the luminal and media-adventitia borders in IVUS frames acquired by 20 MHz probes. Secondly, we propose a region selection strategy to label two ERELs as lumen and media based on the stability of their textural information. We extensively evaluated our selection strategy on the test set of a standard publicly available dataset containing 326 IVUS B-mode images. We showed that in the best case, the average Hausdorff Distances (HD) between the extracted ERELs and the actual lumen and media were $0.22$ mm and $0.45$ mm, respectively. The results of our experiments revealed that our selection strategy was able to segment the lumen with $\le 0.3$ mm HD to the gold standard even though the images contained major artifacts such as bifurcations, shadows, and side branches. Moreover, when there was no artifact, our proposed method was able to delineate media-adventitia boundaries with $0.31$ mm HD to the gold standard. Furthermore, our proposed segmentation method runs in time that is linear in the number of pixels in each frame. Based on the results of this work, by using a 20 MHz IVUS probe with controlled pullback, not only can we now analyze the internal structure of human arteries more accurately, but also segment each frame during the pullback procedure because of the low run time of our proposed segmentation method.
A Simplified Active Calibration algorithm for Focal Length Estimation
Jun 10, 2018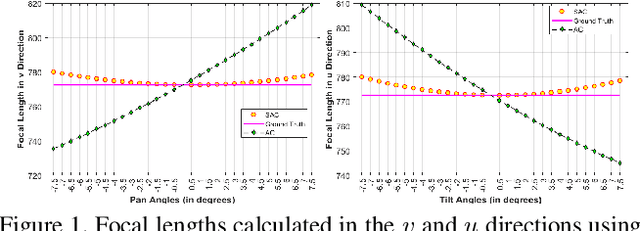
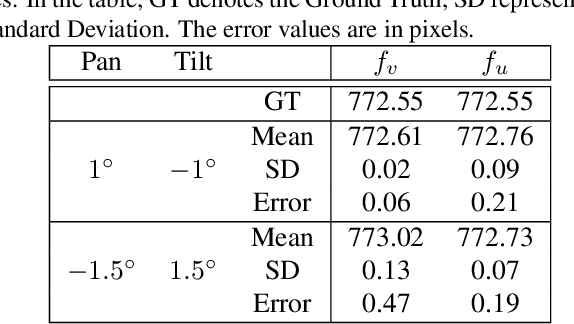
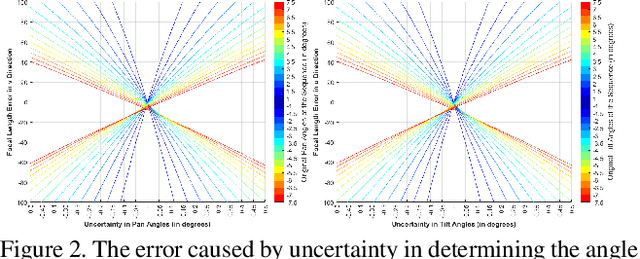

We introduce new linear mathematical formulations to calculate the focal length of a camera in an active platform. Through mathematical derivations, we show that the focal lengths in each direction can be estimated using only one point correspondence that relates images taken before and after a degenerate rotation of the camera. The new formulations will be beneficial in robotic and dynamic surveillance environments when the camera needs to be calibrated while it freely moves and zooms. By establishing a correspondence between only two images taken after slightly panning and tilting the camera and a reference image, our proposed Simplified Calibration Method is able to calculate the focal length of the camera. We extensively evaluate the derived formulations on a simulated camera, 3D scenes and real-world images. Our error analysis over simulated and real images indicates that the proposed Simplified Active Calibration formulation estimates the parameters of a camera with low error rates.
EREL Selection using Morphological Relation
Jun 10, 2018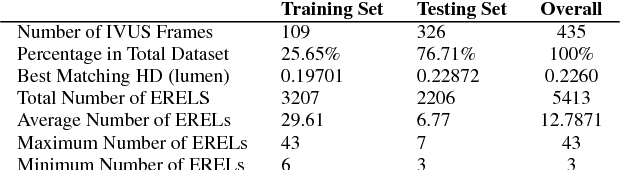
This work concentrates on Extremal Regions of Extremum Level (EREL) selection. EREL is a recently proposed feature detector aiming at detecting regions from a set of extremal regions. This is a branching problem derived from segmentation of arterial wall boundaries from Intravascular Ultrasound (IVUS) images. For each IVUS frame, a set of EREL regions is generated to describe the luminal area of human coronary. Each EREL is then fitted by an ellipse to represent the luminal border. The goal is to assign the most appropriate EREL as the lumen. In this work, EREL selection carries out in two rounds. In the first round, the pattern in a set of EREL regions is analyzed and used to generate an approximate luminal region. Then, the two-dimensional (2D) correlation coefficients are computed between this approximate region and each EREL to keep the ones with tightest relevance. In the second round, a compactness measure is calculated for each EREL and its fitted ellipse to guarantee that the resulting EREL has not affected by the common artifacts such as bifurcations, shadows, and side branches. We evaluated the selected ERELs in terms of Hausdorff Distance (HD) and Jaccard Measure (JM) on the train and test set of a publicly available dataset. The results show that our selection strategy outperforms the current state-of-the-art.