 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow to Coordinate UAVs and UGVs for Efficient Mission Planning? Optimizing Energy-Constrained Cooperative Routing with a DRL Framework
Apr 29, 2025Efficient mission planning for cooperative systems involving Unmanned Aerial Vehicles (UAVs) and Unmanned Ground Vehicles (UGVs) requires addressing energy constraints, scalability, and coordination challenges between agents. UAVs excel in rapidly covering large areas but are constrained by limited battery life, while UGVs, with their extended operational range and capability to serve as mobile recharging stations, are hindered by slower speeds. This heterogeneity makes coordination between UAVs and UGVs critical for achieving optimal mission outcomes. In this work, we propose a scalable deep reinforcement learning (DRL) framework to address the energy-constrained cooperative routing problem for multi-agent UAV-UGV teams, aiming to visit a set of task points in minimal time with UAVs relying on UGVs for recharging during the mission. The framework incorporates sortie-wise agent switching to efficiently manage multiple agents, by allocating task points and coordinating actions. Using an encoder-decoder transformer architecture, it optimizes routes and recharging rendezvous for the UAV-UGV team in the task scenario. Extensive computational experiments demonstrate the framework's superior performance over heuristic methods and a DRL baseline, delivering significant improvements in solution quality and runtime efficiency across diverse scenarios. Generalization studies validate its robustness, while dynamic scenario highlights its adaptability to real-time changes with a case study. This work advances UAV-UGV cooperative routing by providing a scalable, efficient, and robust solution for multi-agent mission planning.
Deep Reinforcement Learning Enabled Persistent Surveillance with Energy-Aware UAV-UGV Systems for Disaster Management Applications
Feb 04, 2025



Integrating Unmanned Aerial Vehicles (UAVs) with Unmanned Ground Vehicles (UGVs) provides an effective solution for persistent surveillance in disaster management. UAVs excel at covering large areas rapidly, but their range is limited by battery capacity. UGVs, though slower, can carry larger batteries for extended missions. By using UGVs as mobile recharging stations, UAVs can extend mission duration through periodic refueling, leveraging the complementary strengths of both systems. To optimize this energy-aware UAV-UGV cooperative routing problem, we propose a planning framework that determines optimal routes and recharging points between a UAV and a UGV. Our solution employs a deep reinforcement learning (DRL) framework built on an encoder-decoder transformer architecture with multi-head attention mechanisms. This architecture enables the model to sequentially select actions for visiting mission points and coordinating recharging rendezvous between the UAV and UGV. The DRL model is trained to minimize the age periods (the time gap between consecutive visits) of mission points, ensuring effective surveillance. We evaluate the framework across various problem sizes and distributions, comparing its performance against heuristic methods and an existing learning-based model. Results show that our approach consistently outperforms these baselines in both solution quality and runtime. Additionally, we demonstrate the DRL policy's applicability in a real-world disaster scenario as a case study and explore its potential for online mission planning to handle dynamic changes. Adapting the DRL policy for priority-driven surveillance highlights the model's generalizability for real-time disaster response.
OptiRoute: A Heuristic-assisted Deep Reinforcement Learning Framework for UAV-UGV Collaborative Route Planning
Sep 18, 2023



Unmanned aerial vehicles (UAVs) are capable of surveying expansive areas, but their operational range is constrained by limited battery capacity. The deployment of mobile recharging stations using unmanned ground vehicles (UGVs) significantly extends the endurance and effectiveness of UAVs. However, optimizing the routes of both UAVs and UGVs, known as the UAV-UGV cooperative routing problem, poses substantial challenges, particularly with respect to the selection of recharging locations. Here in this paper, we leverage reinforcement learning (RL) for the purpose of identifying optimal recharging locations while employing constraint programming to determine cooperative routes for the UAV and UGV. Our proposed framework is then benchmarked against a baseline solution that employs Genetic Algorithms (GA) to select rendezvous points. Our findings reveal that RL surpasses GA in terms of reducing overall mission time, minimizing UAV-UGV idle time, and mitigating energy consumption for both the UAV and UGV. These results underscore the efficacy of incorporating heuristics to assist RL, a method we refer to as heuristics-assisted RL, in generating high-quality solutions for intricate routing problems.
Cooperative Multi-Agent Planning Framework for Fuel Constrained UAV-UGV Routing Problem
Sep 06, 2023Unmanned Aerial Vehicles (UAVs), although adept at aerial surveillance, are often constrained by limited battery capacity. By refueling on slow-moving Unmanned Ground Vehicles (UGVs), their operational endurance can be significantly enhanced. This paper explores the computationally complex problem of cooperative UAV-UGV routing for vast area surveillance within the speed and fuel constraints, presenting a sequential multi-agent planning framework for achieving feasible and optimally satisfactory solutions. By considering the UAV fuel limits and utilizing a minimum set cover algorithm, we determine UGV refueling stops, which in turn facilitate UGV route planning at the first step and through a task allocation technique and energy constrained vehicle routing problem modeling with time windows (E-VRPTW) we achieve the UAV route at the second step of the framework. The effectiveness of our multi-agent strategy is demonstrated through the implementation on 30 different task scenarios across 3 different scales. This work offers significant insight into the collaborative advantages of UAV-UGV systems and introduces heuristic approaches to bypass computational challenges and swiftly reach high-quality solutions.
Solving Vehicle Routing Problem for unmanned heterogeneous vehicle systems using Asynchronous Multi-Agent Architecture (A-teams)
Mar 07, 2023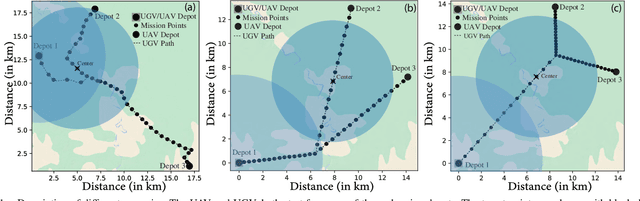
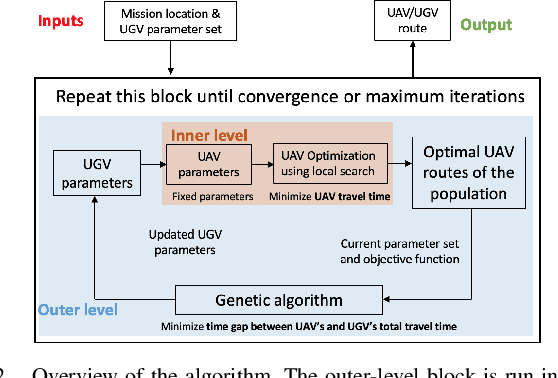
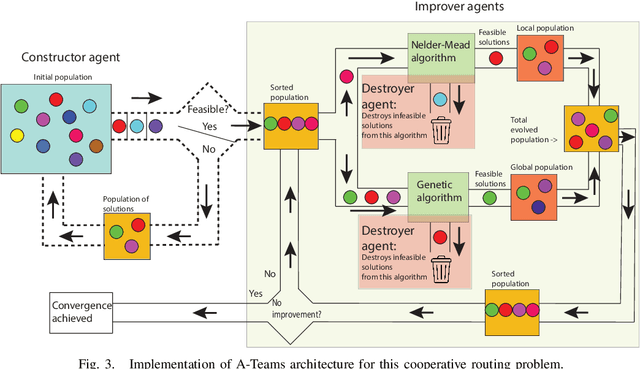
Fast moving but power hungry unmanned aerial vehicles (UAVs) can recharge on slow-moving unmanned ground vehicles (UGVs) to survey large areas in an effective and efficient manner. In order to solve this computationally challenging problem in a reasonable time, we created a two-level optimization heuristics. At the outer level, the UGV route is parameterized by few free parameters and at the inner level, the UAV route is solved by formulating and solving a vehicle routing problem with capacity constraints, time windows, and dropped visits. The UGV free parameters need to be optimized judiciously in order to create high quality solutions. We explore two methods for tuning the free UGV parameters: (1) a genetic algorithm, and (2) Asynchronous Multi-agent architecture (Ateams). The A-teams uses multiple agents to create, improve, and destroy solutions. The parallel asynchronous architecture enables A-teams to quickly optimize the parameters. Our results on test cases show that the A-teams produces similar solutions as genetic algorithm but with a speed up of 2-3 times.
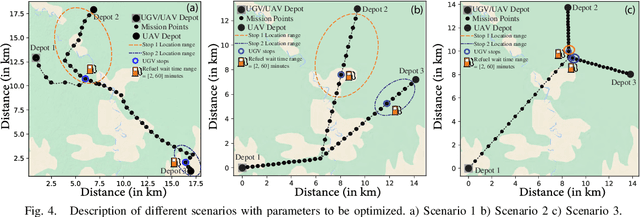
A Bilevel Optimization Framework For fuel-constrained UAV-UGV Cooperative Routing: Planning and Experimental Validation
Mar 04, 2023Fast moving unmanned aerial vehicles (UAVs) are well suited for aerial surveillance, but are limited by their battery capacity. To increase their endurance UAVs can be refueled on slow moving unmanned ground vehicles (UGVs). The cooperative routing of UAV-UGV to survey vast regions within their speed and fuel constraints is a computationally challenging problem, but can be simplified with heuristics. Here we present multiple heuristics to enable feasible and sufficiently optimal solutions to the problem. Using the UAV fuel limits and the minimum set cover algorithm, the UGV refueling stops are determined. These refueling stops enable the allocation of mission points to the UAV and UGV. A standard traveling salesman formulation and a vehicle routing formulation with time windows, dropped visits, and capacity constraints is used to solve for the UGV and UAV route, respectively. Experimental validation of the approach on a small-scale testbed shows the efficacy of the approach.