 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOvercoming Autoware-Ubuntu Incompatibility in Autonomous Driving Systems-Equipped Vehicles: Lessons Learned
Oct 09, 2024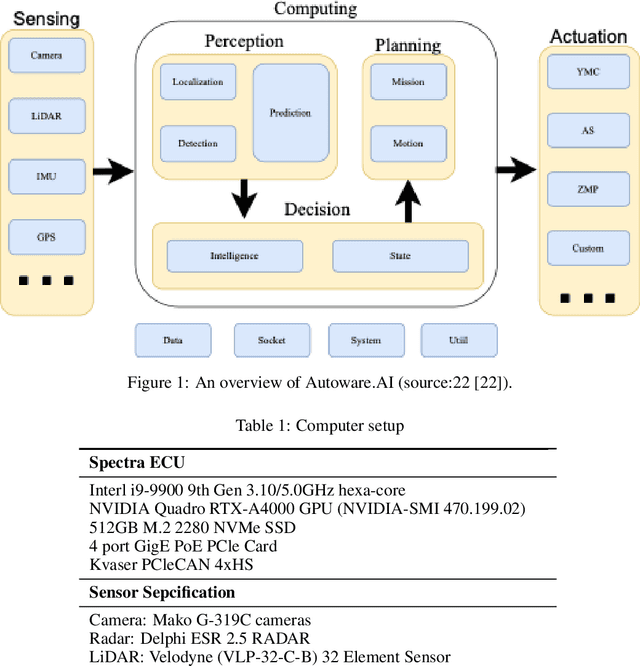
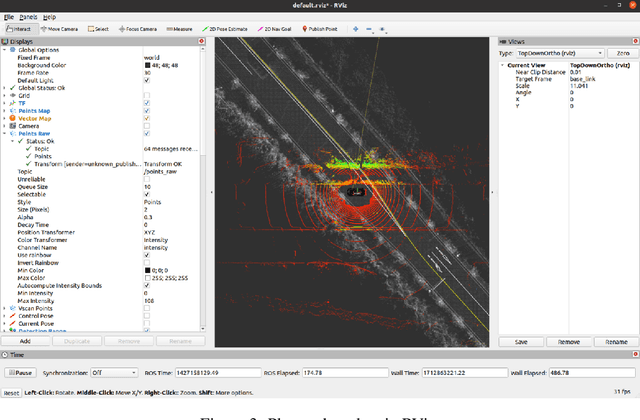
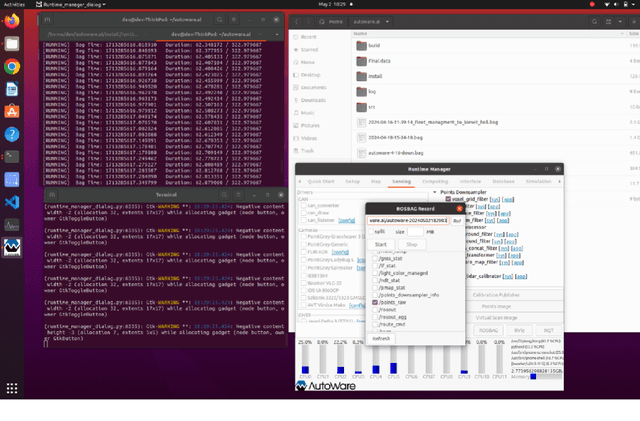
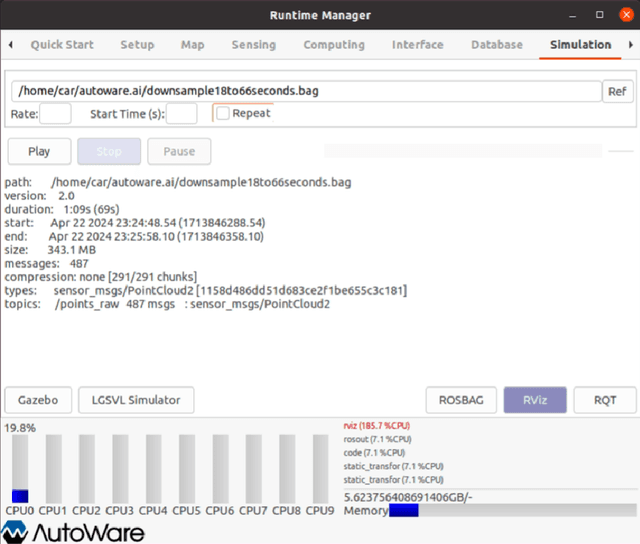
Autonomous vehicles have been rapidly developed as demand that provides safety and efficiency in transportation systems. As autonomous vehicles are designed based on open-source operating and computing systems, there are numerous resources aimed at building an operating platform composed of Ubuntu, Autoware, and Robot Operating System (ROS). However, no explicit guidelines exist to help scholars perform trouble-shooting due to incompatibility between the Autoware platform and Ubuntu operating systems installed in autonomous driving systems-equipped vehicles (i.e., Chrysler Pacifica). The paper presents an overview of integrating the Autoware platform into the autonomous vehicle's interface based on lessons learned from trouble-shooting processes for resolving incompatible issues. The trouble-shooting processes are presented based on resolving the incompatibility and integration issues of Ubuntu 20.04, Autoware.AI, and ROS Noetic software installed in an autonomous driving systems-equipped vehicle. Specifically, the paper focused on common incompatibility issues and code-solving protocols involving Python compatibility, Compute Unified Device Architecture (CUDA) installation, Autoware installation, and simulation in Autoware.AI. The objective of the paper is to provide an explicit and detail-oriented presentation to showcase how to address incompatibility issues among an autonomous vehicle's operating interference. The lessons and experience presented in the paper will be useful for researchers who encountered similar issues and could follow up by performing trouble-shooting activities and implementing ADS-related projects in the Ubuntu, Autoware, and ROS operating systems.
Characterizing Encrypted Application Traffic through Cellular Radio Interface Protocol
Jul 10, 2024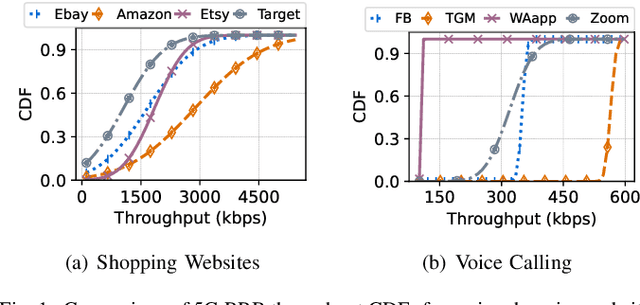
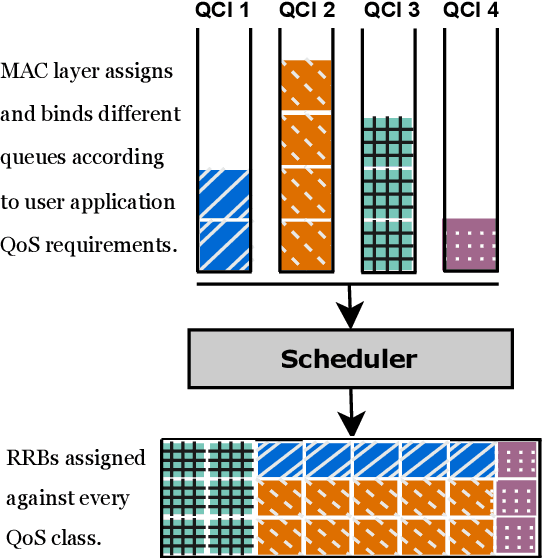
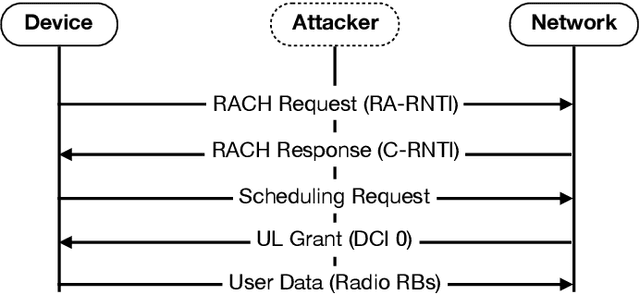
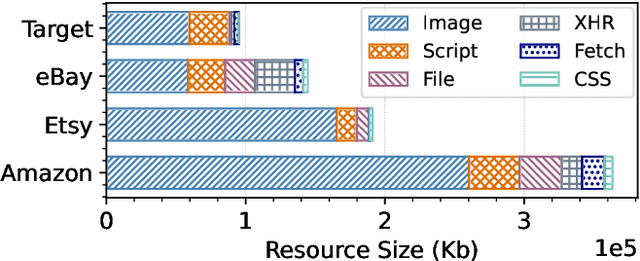
Modern applications are end-to-end encrypted to prevent data from being read or secretly modified. 5G tech nology provides ubiquitous access to these applications without compromising the application-specific performance and latency goals. In this paper, we empirically demonstrate that 5G radio communication becomes the side channel to precisely infer the user's applications in real-time. The key idea lies in observing the 5G physical and MAC layer interactions over time that reveal the application's behavior. The MAC layer receives the data from the application and requests the network to assign the radio resource blocks. The network assigns the radio resources as per application requirements, such as priority, Quality of Service (QoS) needs, amount of data to be transmitted, and buffer size. The adversary can passively observe the radio resources to fingerprint the applications. We empirically demonstrate this attack by considering four different categories of applications: online shopping, voice/video conferencing, video streaming, and Over-The-Top (OTT) media platforms. Finally, we have also demonstrated that an attacker can differentiate various types of applications in real-time within each category.
Image-based Deep Learning for Smart Digital Twins: a Review
Jan 04, 2024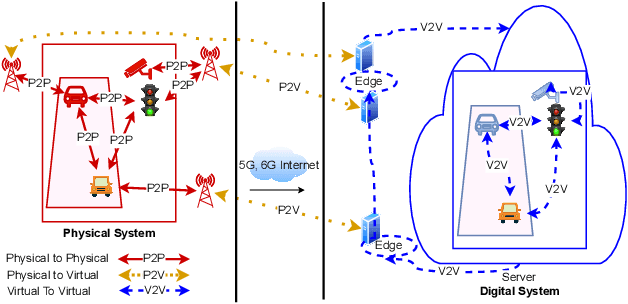
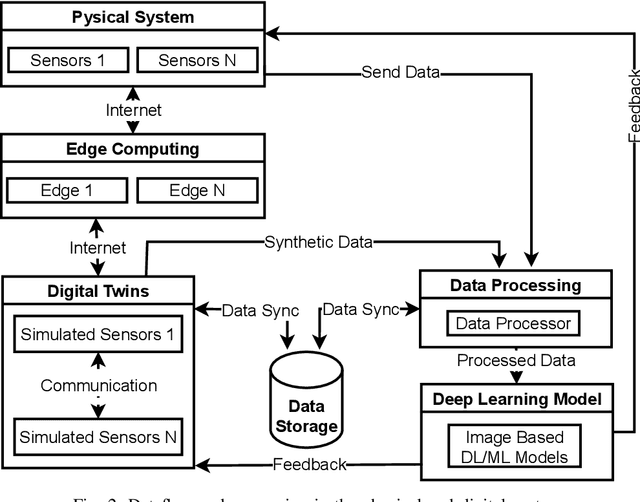
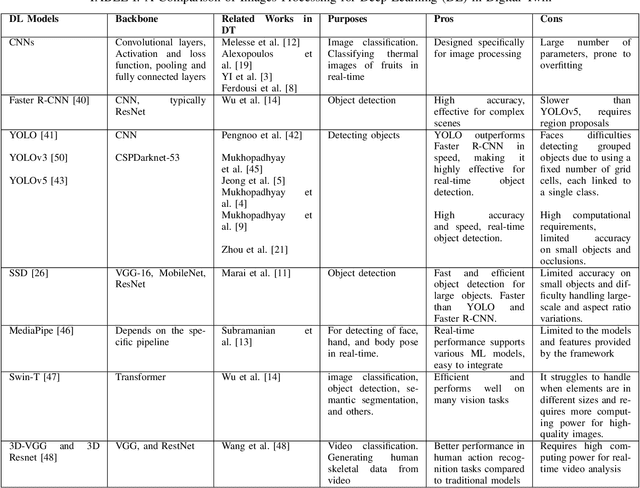
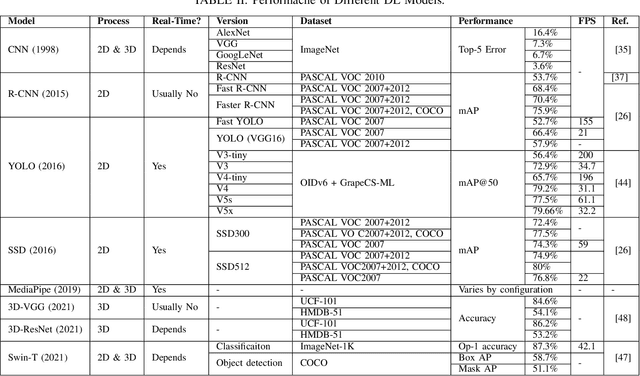
Smart Digital twins (SDTs) are being increasingly used to virtually replicate and predict the behaviors of complex physical systems through continual data assimilation enabling the optimization of the performance of these systems by controlling the actions of systems. Recently, deep learning (DL) models have significantly enhanced the capabilities of SDTs, particularly for tasks such as predictive maintenance, anomaly detection, and optimization. In many domains, including medicine, engineering, and education, SDTs use image data (image-based SDTs) to observe and learn system behaviors and control their behaviors. This paper focuses on various approaches and associated challenges in developing image-based SDTs by continually assimilating image data from physical systems. The paper also discusses the challenges involved in designing and implementing DL models for SDTs, including data acquisition, processing, and interpretation. In addition, insights into the future directions and opportunities for developing new image-based DL approaches to develop robust SDTs are provided. This includes the potential for using generative models for data augmentation, developing multi-modal DL models, and exploring the integration of DL with other technologies, including 5G, edge computing, and IoT. In this paper, we describe the image-based SDTs, which enable broader adoption of the digital twin DT paradigms across a broad spectrum of areas and the development of new methods to improve the abilities of SDTs in replicating, predicting, and optimizing the behavior of complex systems.