 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmart Fleet Solutions: Simulating Electric AGV Performance in Industrial Settings
Aug 22, 2024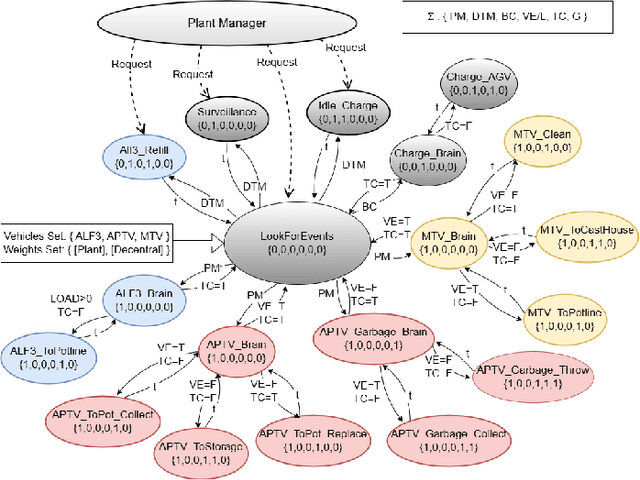
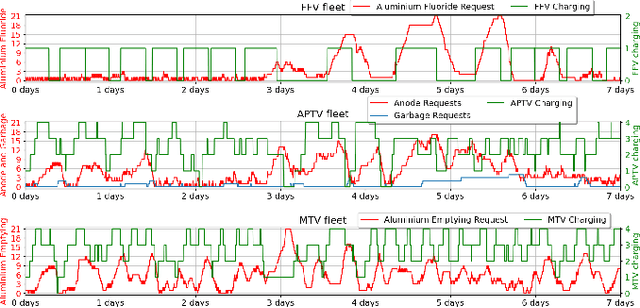
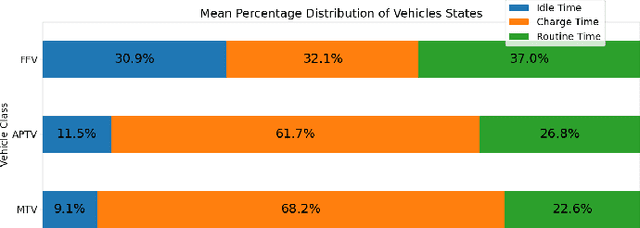
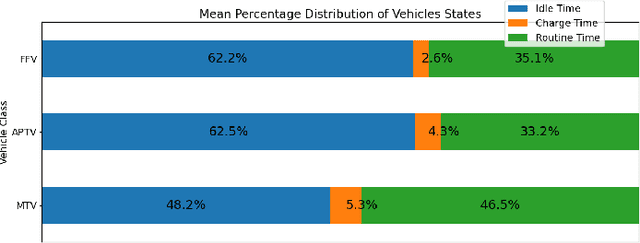
This paper explores the potential benefits and challenges of integrating Electric Vehicles (EVs) and Autonomous Ground Vehicles (AGVs) in industrial settings to improve sustainability and operational efficiency. While EVs offer environmental advantages, barriers like high costs and limited range hinder their widespread use. Similarly, AGVs, despite their autonomous capabilities, face challenges in technology integration and reliability. To address these issues, the paper develops a fleet management tool tailored for coordinating electric AGVs in industrial environments. The study focuses on simulating electric AGV performance in a primary aluminum plant to provide insights into their effectiveness and offer recommendations for optimizing fleet performance.
Integrated Hardware and Software Architecture for Industrial AGV with Manual Override Capability
Aug 22, 2024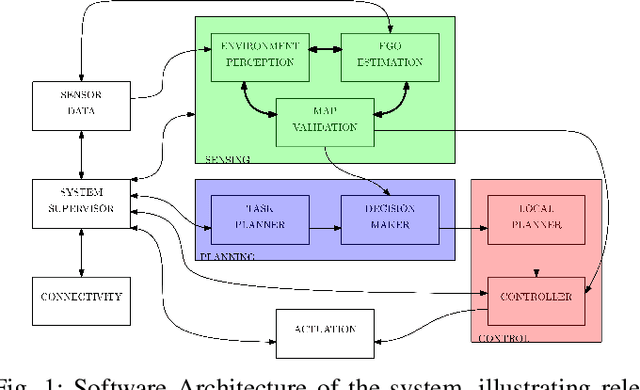
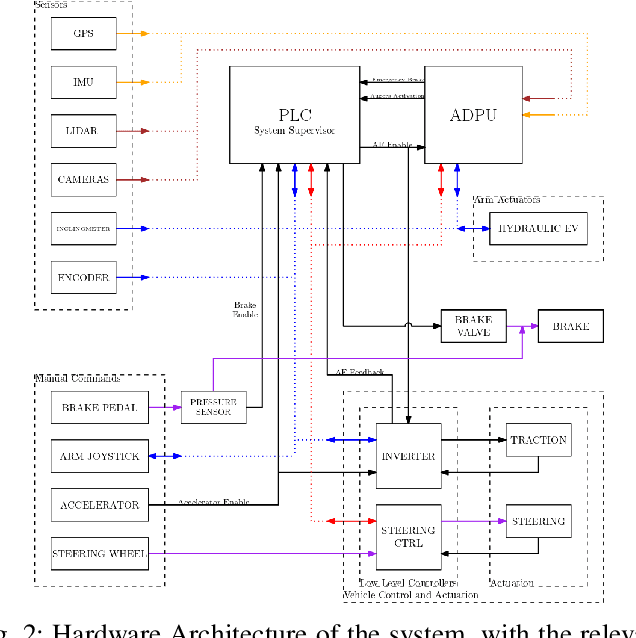
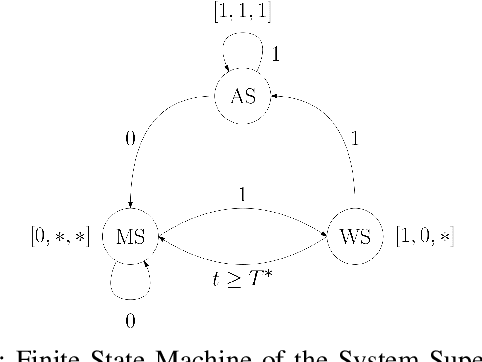
This paper presents a study on transforming a traditional human-operated vehicle into a fully autonomous device. By leveraging previous research and state-of-the-art technologies, the study addresses autonomy, safety, and operational efficiency in industrial environments. Motivated by the demand for automation in hazardous and complex industries, the autonomous system integrates sensors, actuators, advanced control algorithms, and communication systems to enhance safety, streamline processes, and improve productivity. The paper covers system requirements, hardware architecture, software framework and preliminary results. This research offers insights into designing and implementing autonomous capabilities in human-operated vehicles, with implications for improving safety and efficiency in various industrial sectors.