 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSecurity Properties as Nested Causal Statements
Apr 02, 2021Thinking in terms of causality helps us structure how different parts of a system depend on each other, and how interventions on one part of a system may result in changes to other parts. Therefore, formal models of causality are an attractive tool for reasoning about security, which concerns itself with safeguarding properties of a system against interventions that may be malicious. As we show, many security properties are naturally expressed as nested causal statements: not only do we consider what caused a particular undesirable effect, but we also consider what caused this causal relationship itself to hold. We present a natural way to extend the Halpern-Pearl (HP) framework for causality to capture such nested causal statements. This extension adds expressivity, enabling the HP framework to distinguish between causal scenarios that it could not previously naturally tell apart. We moreover revisit some design decisions of the HP framework that were made with non-nested causal statements in mind, such as the choice to treat specific values of causal variables as opposed to the variables themselves as causes, and may no longer be appropriate for nested ones.
Information Acquisition Under Resource Limitations in a Noisy Environment
May 20, 2020We introduce a theoretical model of information acquisition under resource limitations in a noisy environment. An agent must guess the truth value of a given Boolean formula $\varphi$ after performing a bounded number of noisy tests of the truth values of variables in the formula. We observe that, in general, the problem of finding an optimal testing strategy for $\phi$ is hard, but we suggest a useful heuristic. The techniques we use also give insight into two apparently unrelated, but well-studied problems: (1) \emph{rational inattention}, that is, when it is rational to ignore pertinent information (the optimal strategy may involve hardly ever testing variables that are clearly relevant to $\phi$), and (2) what makes a formula hard to learn/remember.
In the Shadows, Shape Priors Shine: Using Occlusion to Improve Multi-Region Segmentation
Jun 14, 2016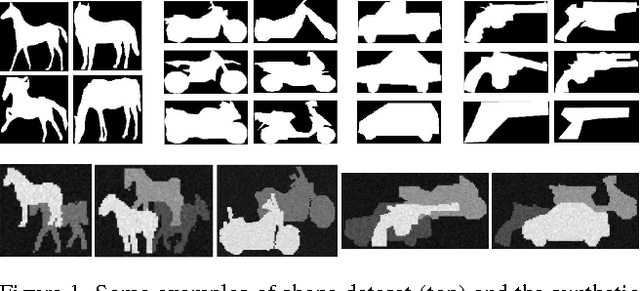
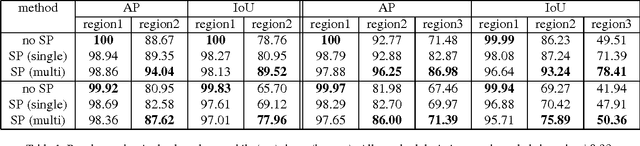
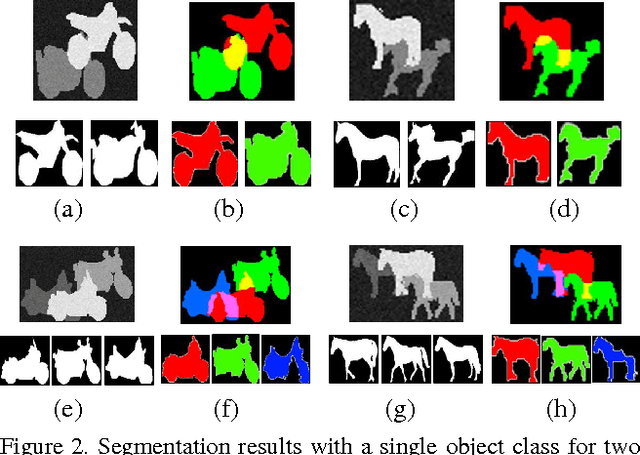

We present a new algorithm for multi-region segmentation of 2D images with objects that may partially occlude each other. Our algorithm is based on the observation hat human performance on this task is based both on prior knowledge about plausible shapes and taking into account the presence of occluding objects whose shape is already known - once an occluded region is identified, the shape prior can be used to guess the shape of the missing part. We capture the former aspect using a deep learning model of shape; for the latter, we simultaneously minimize the energy of all regions and consider only unoccluded pixels for data agreement. Existing algorithms incorporating object shape priors consider every object separately in turn and can't distinguish genuine deviation from the expected shape from parts missing due to occlusion. We show that our method significantly improves on the performance of a representative algorithm, as evaluated on both preprocessed natural and synthetic images. Furthermore, on the synthetic images, we recover the ground truth segmentation with good accuracy.