 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNetwork Fault-tolerant and Byzantine-resilient Social Learning via Collaborative Hierarchical Non-Bayesian Learning
Jul 27, 2023As the network scale increases, existing fully distributed solutions start to lag behind the real-world challenges such as (1) slow information propagation, (2) network communication failures, and (3) external adversarial attacks. In this paper, we focus on hierarchical system architecture and address the problem of non-Bayesian learning over networks that are vulnerable to communication failures and adversarial attacks. On network communication, we consider packet-dropping link failures. We first propose a hierarchical robust push-sum algorithm that can achieve average consensus despite frequent packet-dropping link failures. We provide a sparse information fusion rule between the parameter server and arbitrarily selected network representatives. Then, interleaving the consensus update step with a dual averaging update with Kullback-Leibler (KL) divergence as the proximal function, we obtain a packet-dropping fault-tolerant non-Bayesian learning algorithm with provable convergence guarantees. On external adversarial attacks, we consider Byzantine attacks in which the compromised agents can send maliciously calibrated messages to others (including both the agents and the parameter server). To avoid the curse of dimensionality of Byzantine consensus, we solve the non-Bayesian learning problem via running multiple dynamics, each of which only involves Byzantine consensus with scalar inputs. To facilitate resilient information propagation across sub-networks, we use a novel Byzantine-resilient gossiping-type rule at the parameter server.
Fast and Robust State Estimation and Tracking via Hierarchical Learning
Jun 29, 2023
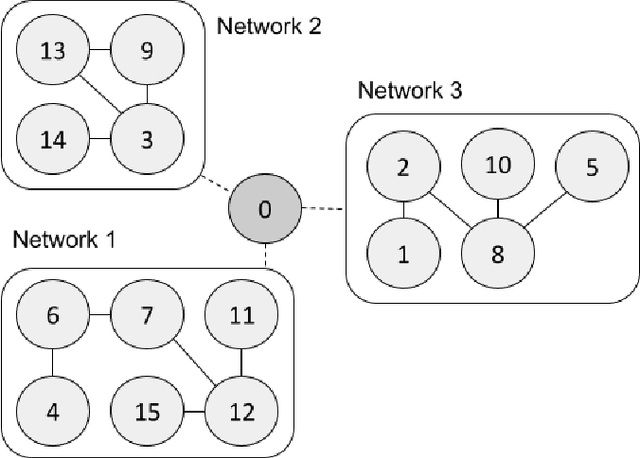

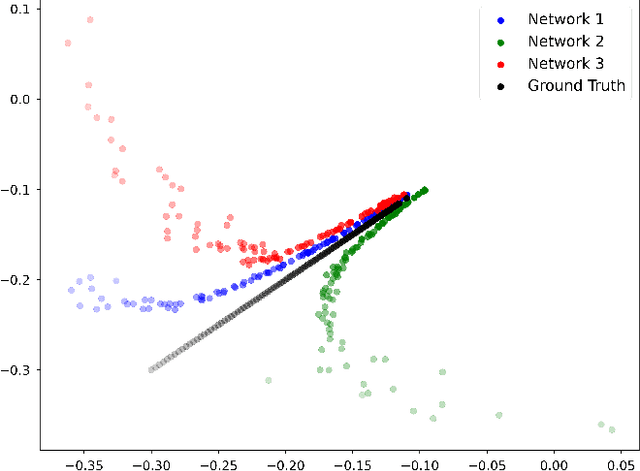
Fully distributed estimation and tracking solutions to large-scale multi-agent networks suffer slow convergence and are vulnerable to network failures. In this paper, we aim to speed up the convergence and enhance the resilience of state estimation and tracking using a simple hierarchical system architecture wherein agents are clusters into smaller networks, and a parameter server exists to aid the information exchanges among networks. The information exchange among networks is expensive and occurs only once in a while. We propose two consensus + innovation algorithms for the state estimation and tracking problems, respectively. In both algorithms, we use a novel hierarchical push-sum consensus component. For the state estimation, we use dual averaging as the local innovation component. State tracking is much harder to tackle in the presence of dropping-link failures and the standard integration of the consensus and innovation approaches are no longer applicable. Moreover, dual averaging is no longer feasible. Our algorithm introduces a pair of additional variables per link and ensure the relevant local variables evolve according to the state dynamics, and use projected local gradient descent as the local innovation component. We also characterize the convergence rates of both of the algorithms under linear local observation model and minimal technical assumptions. We numerically validate our algorithm through simulation of both state estimation and tracking problems.