 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStiffness-based Analytic Centre Method for Cable-Driven Parallel Robots
May 12, 2025Nowadays, being fast and precise are key requirements in Robotics. This work introduces a novel methodology to tune the stiffness of Cable-Driven Parallel Robots (CDPRs) while simultaneously addressing the tension distribution problem. In particular, the approach relies on the Analytic-Centre method. Indeed, weighting the barrier functions makes natural the stiffness adaptation. The intrinsic ability to adjust the stiffness during the execution of the task enables the CDPRs to effectively meet above-mentioned requirements. The capabilities of the method are demonstrated through simulations by comparing it with the existing approach.
Motion Prediction with Gaussian Processes for Safe Human-Robot Interaction in Virtual Environments
May 15, 2024



Humans use collaborative robots as tools for accomplishing various tasks. The interaction between humans and robots happens in tight shared workspaces. However, these machines must be safe to operate alongside humans to minimize the risk of accidental collisions. Ensuring safety imposes many constraints, such as reduced torque and velocity limits during operation, thus increasing the time to accomplish many tasks. However, for applications such as using collaborative robots as haptic interfaces with intermittent contacts for virtual reality applications, speed limitations result in poor user experiences. This research aims to improve the efficiency of a collaborative robot while improving the safety of the human user. We used Gaussian process models to predict human hand motion and developed strategies for human intention detection based on hand motion and gaze to improve the time for the robot and human security in a virtual environment. We then studied the effect of prediction. Results from comparisons show that the prediction models improved the robot time by 3\% and safety by 17\%. When used alongside gaze, prediction with Gaussian process models resulted in an improvement of the robot time by 2\% and the safety by 13\%.
HEDRA: A Bio-Inspired Modular Tensegrity Soft Robot With Polyhedral Parallel Modules
Nov 29, 2020

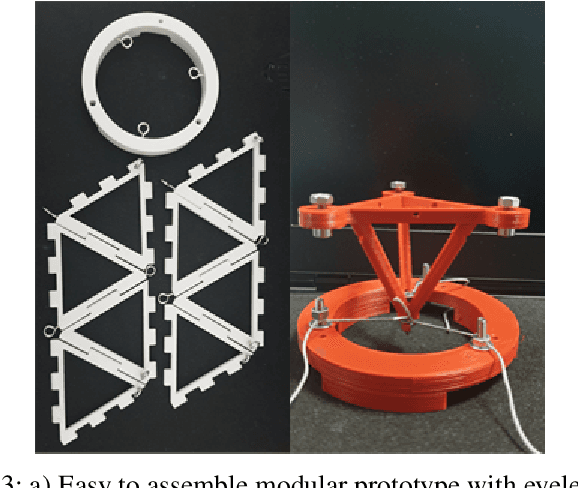
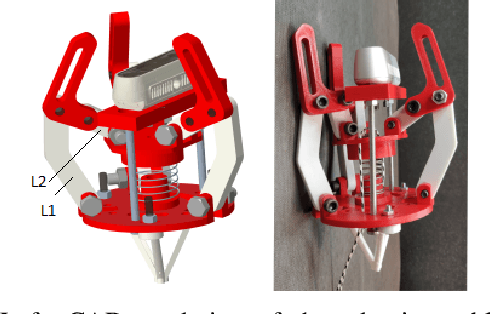
There is a surge of research interest in the field of tensegrity robotics. Robots developed under this paradigm provide many advantages and have distinguishing features in terms of structural compliance, dexterity, safety, and weight reduction. This paper proposes a new robotic mechanism based on tensegrity ('tension-integrity') robots and reconfigurable modular robots. The specific actuation schemes for this tensegrity robot with multiple degrees of freedom are presented. This article describes an easy-to-assemble 350 mm tensegrity based robot prototype by stacking a series of rigid struts linked with tensegrity joints that have no direct rigid contact with each other. The functionality of the proposed robot is validated by the experimental results by integrating the polyhedral parallel structure as its skeleton and series of tensegrity joints. The proposed manipulator is capable of reaching bending angles up to 76 degrees. An adaptive cable driven underactuated robotic gripper is designed and attached to the tensegrity manipulator for grasping objects in different shapes, weights, and sizes.