 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-Aware Online Extrinsic Calibration: A Conformal Prediction Approach
Jan 12, 2025Accurate sensor calibration is crucial for autonomous systems, yet its uncertainty quantification remains underexplored. We present the first approach to integrate uncertainty awareness into online extrinsic calibration, combining Monte Carlo Dropout with Conformal Prediction to generate prediction intervals with a guaranteed level of coverage. Our method proposes a framework to enhance existing calibration models with uncertainty quantification, compatible with various network architectures. Validated on KITTI (RGB Camera-LiDAR) and DSEC (Event Camera-LiDAR) datasets, we demonstrate effectiveness across different visual sensor types, measuring performance with adapted metrics to evaluate the efficiency and reliability of the intervals. By providing calibration parameters with quantifiable confidence measures, we offer insights into the reliability of calibration estimates, which can greatly improve the robustness of sensor fusion in dynamic environments and usefully serve the Computer Vision community.
MULi-Ev: Maintaining Unperturbed LiDAR-Event Calibration
May 28, 2024Despite the increasing interest in enhancing perception systems for autonomous vehicles, the online calibration between event cameras and LiDAR - two sensors pivotal in capturing comprehensive environmental information - remains unexplored. We introduce MULi-Ev, the first online, deep learning-based framework tailored for the extrinsic calibration of event cameras with LiDAR. This advancement is instrumental for the seamless integration of LiDAR and event cameras, enabling dynamic, real-time calibration adjustments that are essential for maintaining optimal sensor alignment amidst varying operational conditions. Rigorously evaluated against the real-world scenarios presented in the DSEC dataset, MULi-Ev not only achieves substantial improvements in calibration accuracy but also sets a new standard for integrating LiDAR with event cameras in mobile platforms. Our findings reveal the potential of MULi-Ev to bolster the safety, reliability, and overall performance of event-based perception systems in autonomous driving, marking a significant step forward in their real-world deployment and effectiveness.
PseudoCal: Towards Initialisation-Free Deep Learning-Based Camera-LiDAR Self-Calibration
Sep 18, 2023



Camera-LiDAR extrinsic calibration is a critical task for multi-sensor fusion in autonomous systems, such as self-driving vehicles and mobile robots. Traditional techniques often require manual intervention or specific environments, making them labour-intensive and error-prone. Existing deep learning-based self-calibration methods focus on small realignments and still rely on initial estimates, limiting their practicality. In this paper, we present PseudoCal, a novel self-calibration method that overcomes these limitations by leveraging the pseudo-LiDAR concept and working directly in the 3D space instead of limiting itself to the camera field of view. In typical autonomous vehicle and robotics contexts and conventions, PseudoCal is able to perform one-shot calibration quasi-independently of initial parameter estimates, addressing extreme cases that remain unsolved by existing approaches.
UniCal: a Single-Branch Transformer-Based Model for Camera-to-LiDAR Calibration and Validation
Apr 19, 2023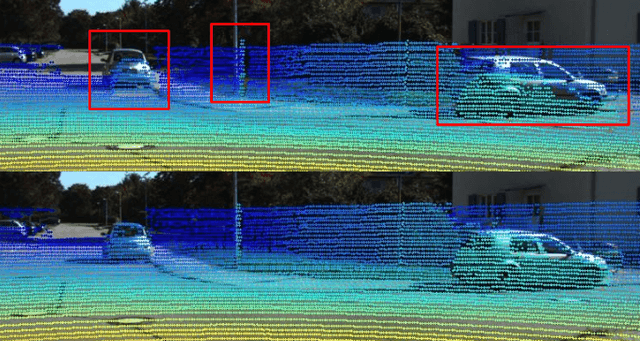
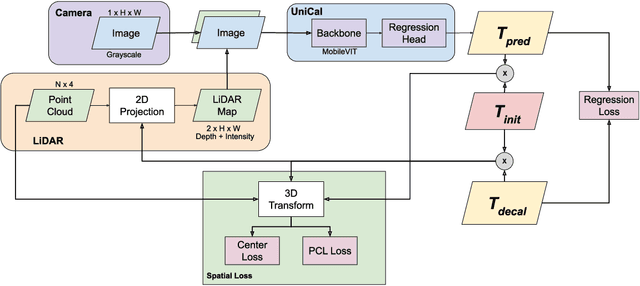

We introduce a novel architecture, UniCal, for Camera-to-LiDAR (C2L) extrinsic calibration which leverages self-attention mechanisms through a Transformer-based backbone network to infer the 6-degree of freedom (DoF) relative transformation between the sensors. Unlike previous methods, UniCal performs an early fusion of the input camera and LiDAR data by aggregating camera image channels and LiDAR mappings into a multi-channel unified representation before extracting their features jointly with a single-branch architecture. This single-branch architecture makes UniCal lightweight, which is desirable in applications with restrained resources such as autonomous driving. Through experiments, we show that UniCal achieves state-of-the-art results compared to existing methods. We also show that through transfer learning, weights learned on the calibration task can be applied to a calibration validation task without re-training the backbone.