 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCASCLIK: CasADi-Based Closed-Loop Inverse Kinematics
Jan 20, 2019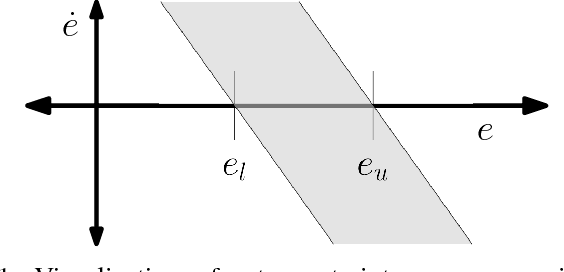
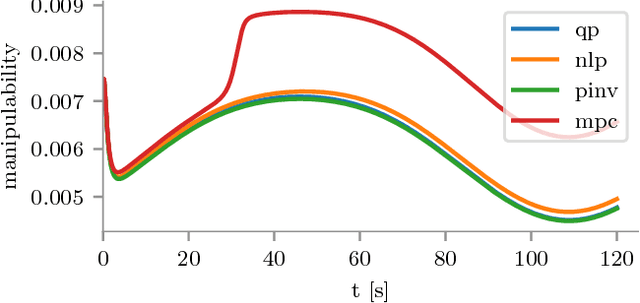

A Python module for rapid prototyping of constraint-based closed-loop inverse kinematics controllers is presented. The module allows for combining multiple tasks that are resolved with a quadratic, nonlinear, or model predictive optimization-based approach, or a set-based task-priority inverse kinematics approach. The optimization-based approaches are described in relation to the set-based task approach, and a novel multidimensional "in tangent cone" function is presented for set-based tasks. A ROS component is provided, and the controllers are tested with matching a pose using either transformation matrices or dual quaternions, trajectory tracking while remaining in a bounded workspace, maximizing manipulability during a tracking task, tracking an input marker's position, and force compliance.
On Model Predictive Path Following and Trajectory Tracking for Industrial Robots
Mar 07, 2017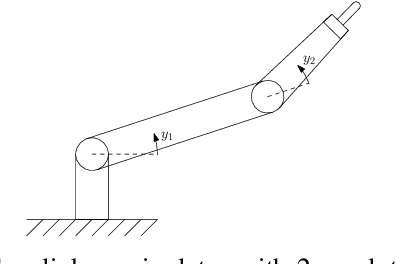
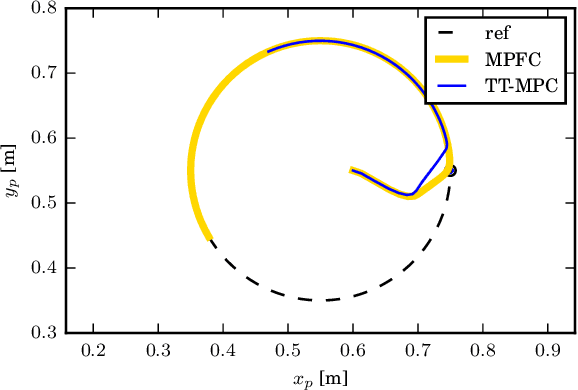
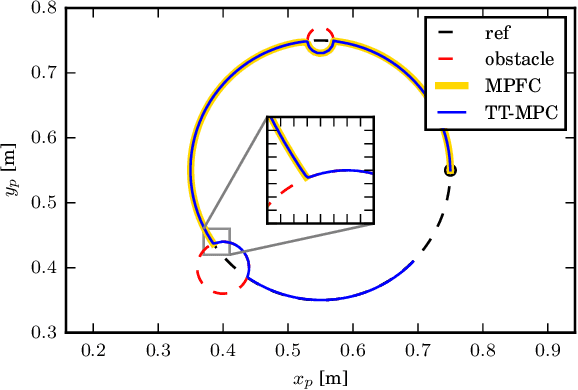
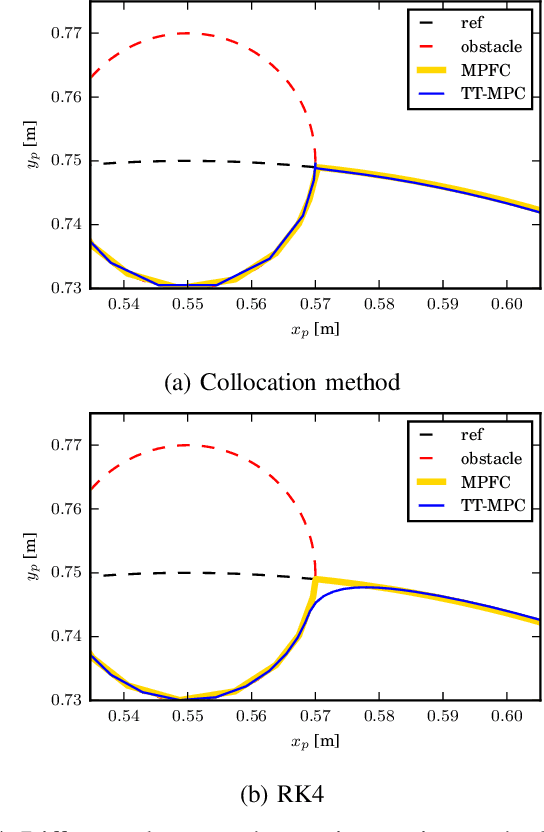
In this article we show how the model predictive path following controller allows robotic manipulators to stop at obstructions in a way that model predictive trajectory tracking controllers cannot. We present both controllers as applied to robotic manipulators, simulations for a two-link manipulator using an interior point solver, consider discretization of the optimal control problem using collocation or Runge-Kutta, and discuss the real-time viability of our implementation of the model predictive path following controller.