 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCASCLIK: CasADi-Based Closed-Loop Inverse Kinematics
Paper and Code
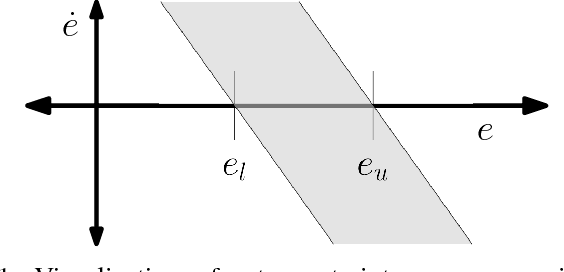
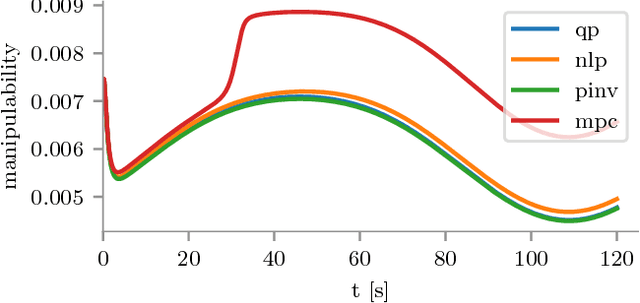

A Python module for rapid prototyping of constraint-based closed-loop inverse kinematics controllers is presented. The module allows for combining multiple tasks that are resolved with a quadratic, nonlinear, or model predictive optimization-based approach, or a set-based task-priority inverse kinematics approach. The optimization-based approaches are described in relation to the set-based task approach, and a novel multidimensional "in tangent cone" function is presented for set-based tasks. A ROS component is provided, and the controllers are tested with matching a pose using either transformation matrices or dual quaternions, trajectory tracking while remaining in a bounded workspace, maximizing manipulability during a tracking task, tracking an input marker's position, and force compliance.