 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrime Prediction Using Multiple-ANFIS Architecture and Spatiotemporal Data
Nov 07, 2020Statistical values alone cannot bring the whole scenario of crime occurrences in the city of Dhaka. We need a better way to use these statistical values to predict crime occurrences and make the city a safer place to live. Proper decision-making for the future is key in reducing the rate of criminal offenses in an area or a city. If the law enforcement bodies can allocate their resources efficiently for the future, the rate of crime in Dhaka can be brought down to a minimum. In this work, we have made an initiative to provide an effective tool with which law enforcement officials and detectives can predict crime occurrences ahead of time and take better decisions easily and quickly. We have used several Fuzzy Inference Systems (FIS) and Adaptive Neuro-Fuzzy Inference Systems (ANFIS) to predict the type of crime that is highly likely to occur at a certain place and time.
Autonomous Intruder Detection Using a ROS-Based Multi-Robot System Equipped with 2D-LiDAR Sensors
Nov 07, 2020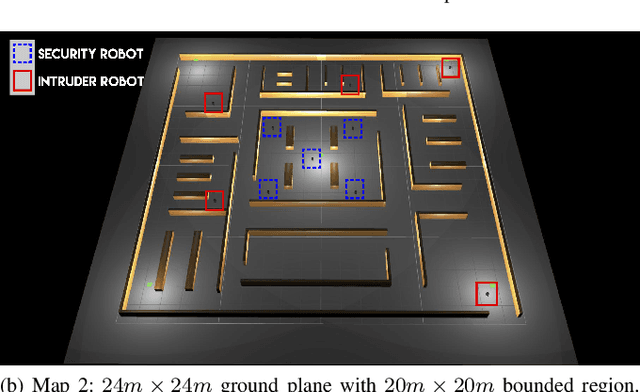
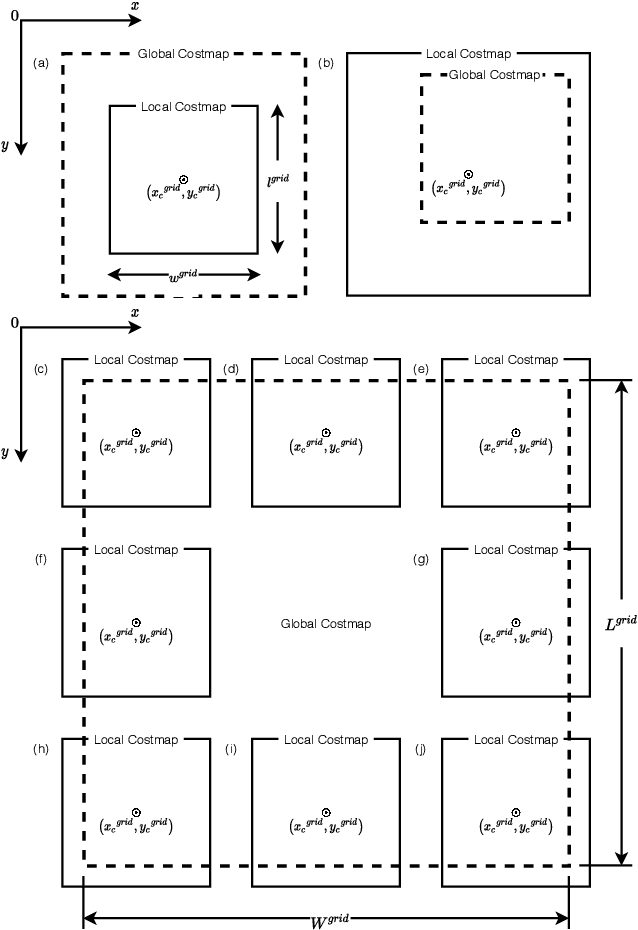
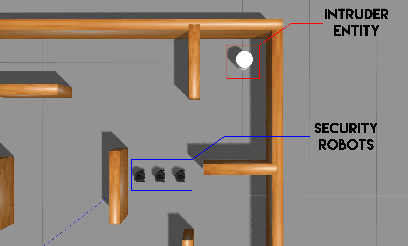
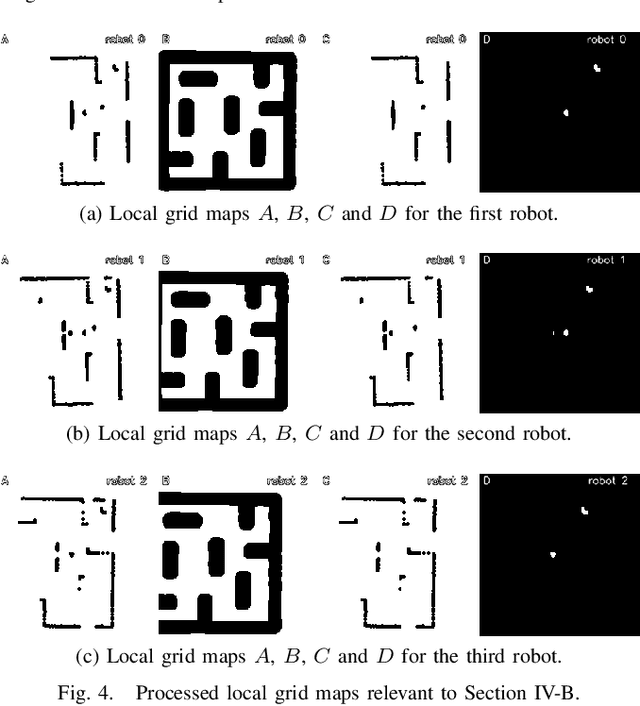
The application of autonomous mobile robots in robotic security platforms is becoming a promising field of innovation due to their adaptive capability of responding to potential disturbances perceived through a wide range of sensors. Researchers have proposed systems that either focus on utilizing a single mobile robot or a system of cooperative multiple robots. However, very few of the proposed works, particularly in the field of multi-robot systems, are completely dependent on LiDAR sensors for achieving various tasks. This is essential when other sensors on a robot fail to provide peak performance in particular conditions, such as a camera operating in the absence of light. This paper proposes a multi-robot system that is developed using ROS (Robot Operating System) for intruder detection in a single-range-sensor-per-robot scenario with centralized processing of detections from all robots by our central bot MIDNet (Multiple Intruder Detection Network). This work is aimed at providing an autonomous multi-robot security solution for a warehouse in the absence of human personnel.