 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccurate Pose Prediction on Signed Distance Fields for Mobile Ground Robots in Rough Terrain
May 03, 2024
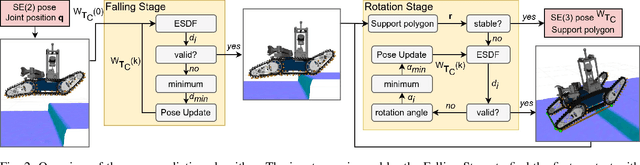
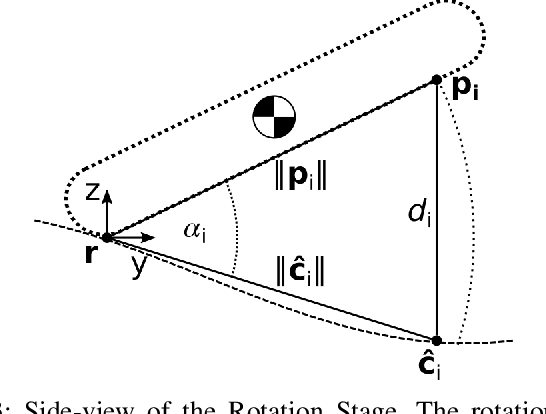
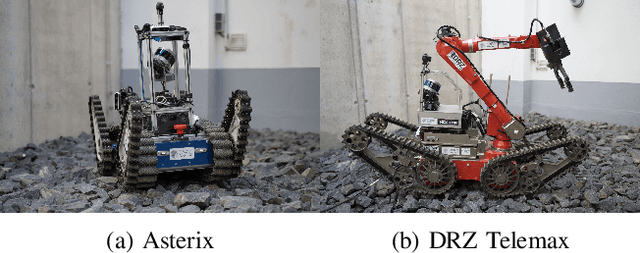
Autonomous locomotion for mobile ground robots in unstructured environments such as waypoint navigation or flipper control requires a sufficiently accurate prediction of the robot-terrain interaction. Heuristics like occupancy grids or traversability maps are widely used but limit actions available to robots with active flippers as joint positions are not taken into account. We present a novel iterative geometric method to predict the 3D pose of mobile ground robots with active flippers on uneven ground with high accuracy and online planning capabilities. This is achieved by utilizing the ability of signed distance fields to represent surfaces with sub-voxel accuracy. The effectiveness of the presented approach is demonstrated on two different tracked robots in simulation and on a real platform. Compared to a tracking system as ground truth, our method predicts the robot position and orientation with an average accuracy of 3.11 cm and 3.91{\deg}, outperforming a recent heightmap-based approach. The implementation is made available as an open-source ROS package.
* Published in: 2023 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). Video: https://youtu.be/3kHDxPnEtHM
3D Coverage Path Planning for Efficient Construction Progress Monitoring
Feb 02, 2023



On construction sites, progress must be monitored continuously to ensure that the current state corresponds to the planned state in order to increase efficiency, safety and detect construction defects at an early stage. Autonomous mobile robots can document the state of construction with high data quality and consistency. However, finding a path that fully covers the construction site is a challenging task as it can be large, slowly changing over time, and contain dynamic objects. Existing approaches are either exploration approaches that require a long time to explore the entire building, object scanning approaches that are not suitable for large and complex buildings, or planning approaches that only consider 2D coverage. In this paper, we present a novel approach for planning an efficient 3D path for progress monitoring on large construction sites with multiple levels. By making use of an existing 3D model we ensure that all surfaces of the building are covered by the sensor payload such as a 360-degree camera or a lidar. This enables the consistent and reliable monitoring of construction site progress with an autonomous ground robot. We demonstrate the effectiveness of the proposed planner on an artificial and a real building model, showing that much shorter paths and better coverage are achieved than with a traditional exploration planner.
* Published in: 2022 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR)
A Flexible Framework for Virtual Omnidirectional Vision to Improve Operator Situation Awareness
Feb 01, 2023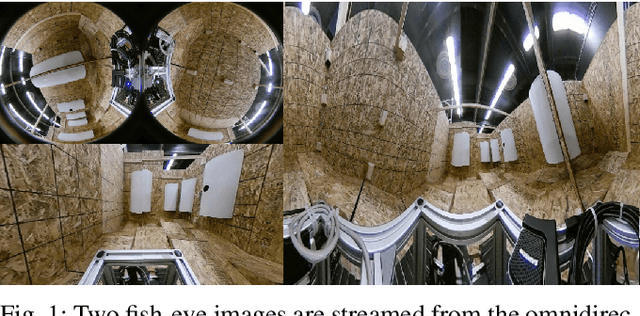
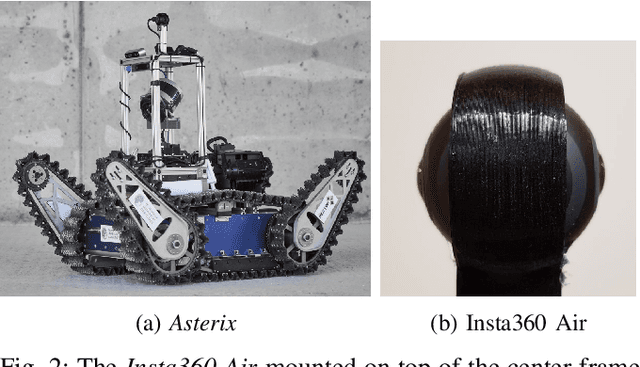
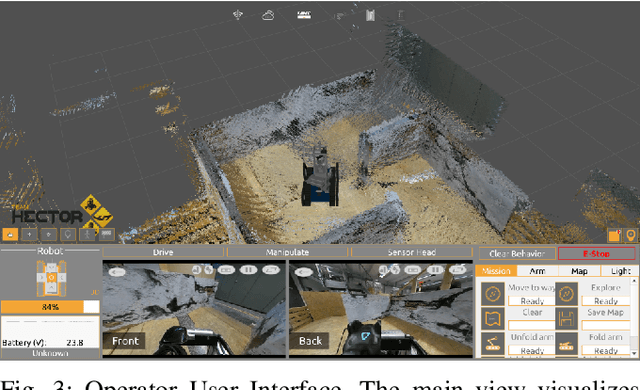
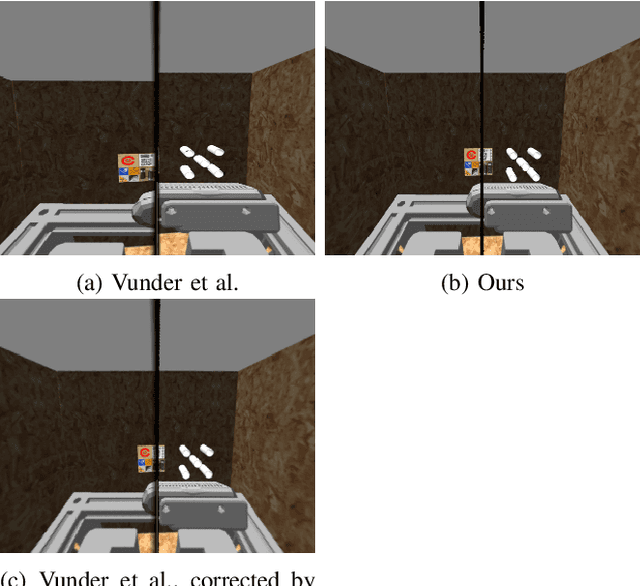
During teleoperation of a mobile robot, providing good operator situation awareness is a major concern as a single mistake can lead to mission failure. Camera streams are widely used for teleoperation but offer limited field-of-view. In this paper, we present a flexible framework for virtual projections to increase situation awareness based on a novel method to fuse multiple cameras mounted anywhere on the robot. Moreover, we propose a complementary approach to improve scene understanding by fusing camera images and geometric 3D Lidar data to obtain a colorized point cloud. The implementation on a compact omnidirectional camera reduces system complexity considerably and solves multiple use-cases on a much smaller footprint compared to traditional approaches such as actuated pan-tilt units. Finally, we demonstrate the generality of the approach by application to the multi-camera system of the Boston Dynamics Spot. The software implementation is available as open-source ROS packages on the project page https://tu-darmstadt-ros-pkg.github.io/omnidirectional_vision.
* Accepted to European Conference on Mobile Robots (ECMR) 2021. Video link: https://youtu.be/7pocpdsMxOM Project page: https://tu-darmstadt-ros-pkg.github.io/omnidirectional_vision