 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated design of relocation rules for minimising energy consumption in the container relocation problem
Jul 04, 2023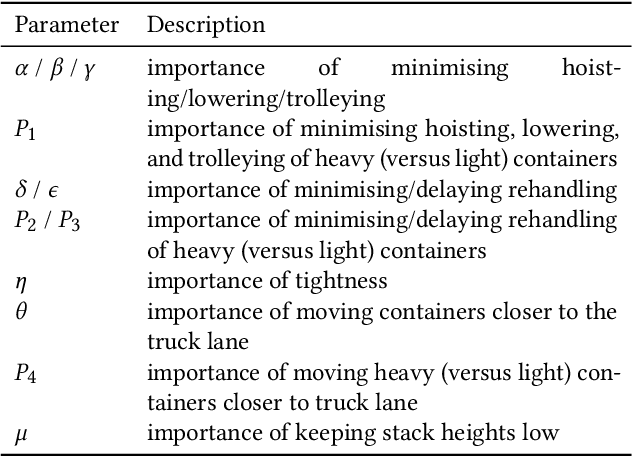
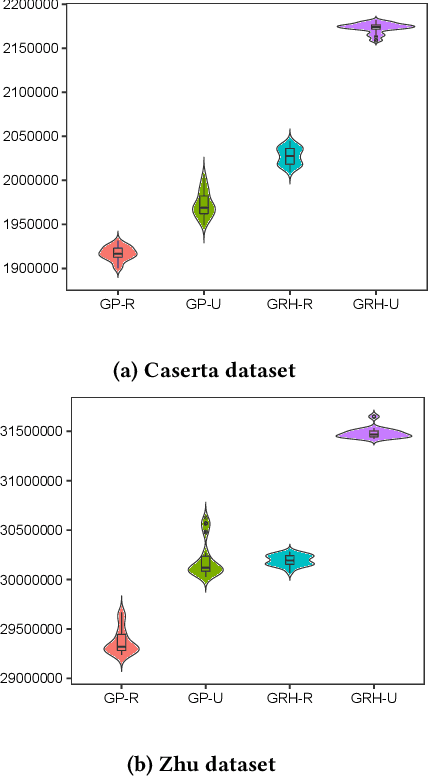
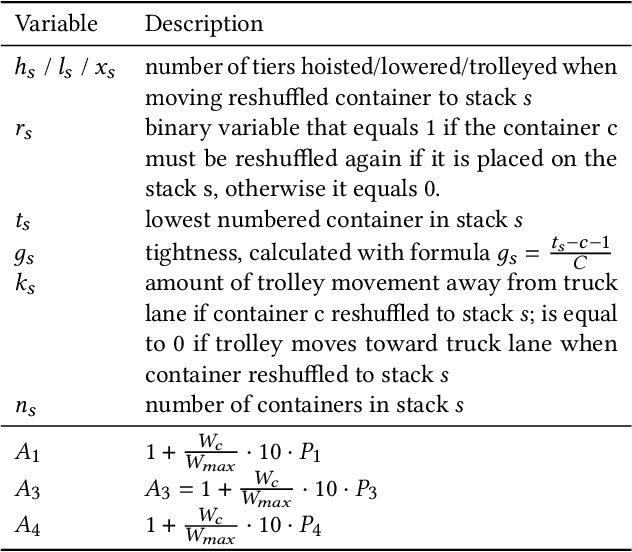
The container relocation problem is a combinatorial optimisation problem aimed at finding a sequence of container relocations to retrieve all containers in a predetermined order by minimising a given objective. Relocation rules (RRs), which consist of a priority function and relocation scheme, are heuristics commonly used for solving the mentioned problem due to their flexibility and efficiency. Recently, in many real-world problems it is becoming increasingly important to consider energy consumption. However, for this variant no RRs exist and would need to be designed manually. One possibility to circumvent this issue is by applying hyperheuristics to automatically design new RRs. In this study we use genetic programming to obtain priority functions used in RRs whose goal is to minimise energy consumption. We compare the proposed approach with a genetic algorithm from the literature used to design the priority function. The results obtained demonstrate that the RRs designed by genetic programming achieve the best performance.
On Evolvability and Behavior Landscapes in Neuroevolutionary Divergent Search
Jun 16, 2023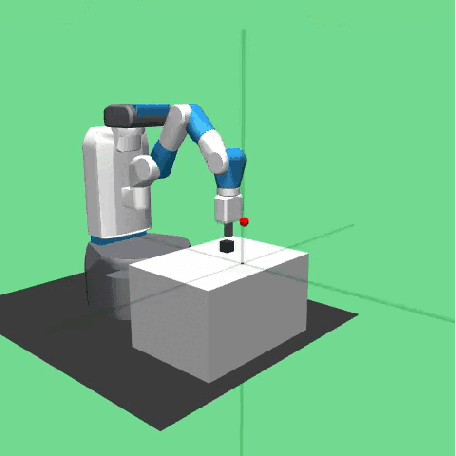
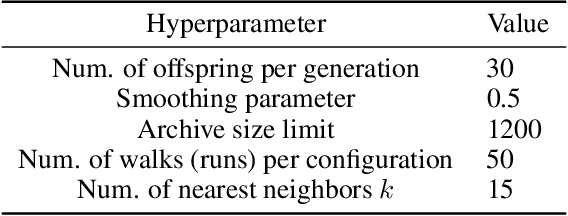
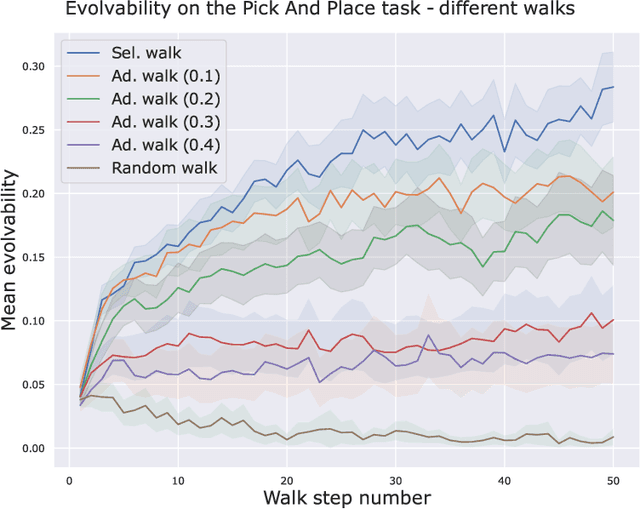
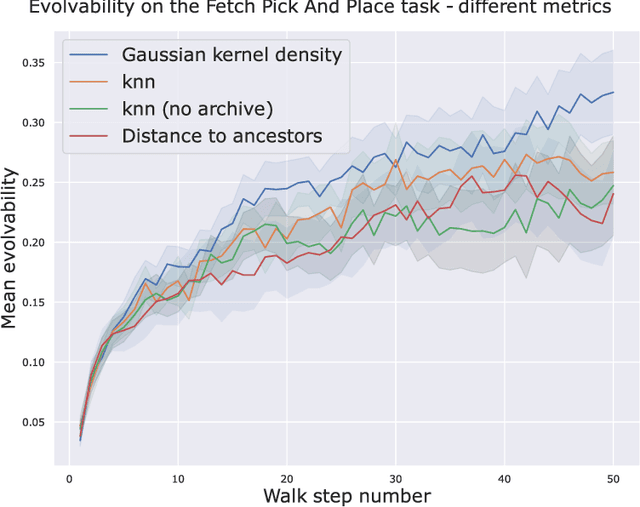
Evolvability refers to the ability of an individual genotype (solution) to produce offspring with mutually diverse phenotypes. Recent research has demonstrated that divergent search methods, particularly novelty search, promote evolvability by implicitly creating selective pressure for it. The main objective of this paper is to provide a novel perspective on the relationship between neuroevolutionary divergent search and evolvability. In order to achieve this, several types of walks from the literature on fitness landscape analysis are first adapted to this context. Subsequently, the interplay between neuroevolutionary divergent search and evolvability under varying amounts of evolutionary pressure and under different diversity metrics is investigated. To this end, experiments are performed on Fetch Pick and Place, a robotic arm task. Moreover, the performed study in particular sheds light on the structure of the genotype-phenotype mapping (the behavior landscape). Finally, a novel definition of evolvability that takes into account the evolvability of offspring and is appropriate for use with discretized behavior spaces is proposed, together with a Markov-chain-based estimation method for it.
A Search for Nonlinear Balanced Boolean Functions by Leveraging Phenotypic Properties
Jun 15, 2023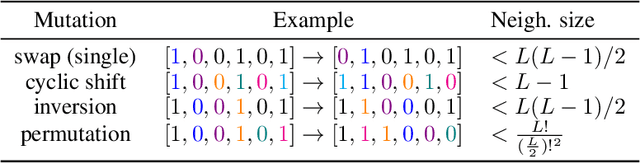
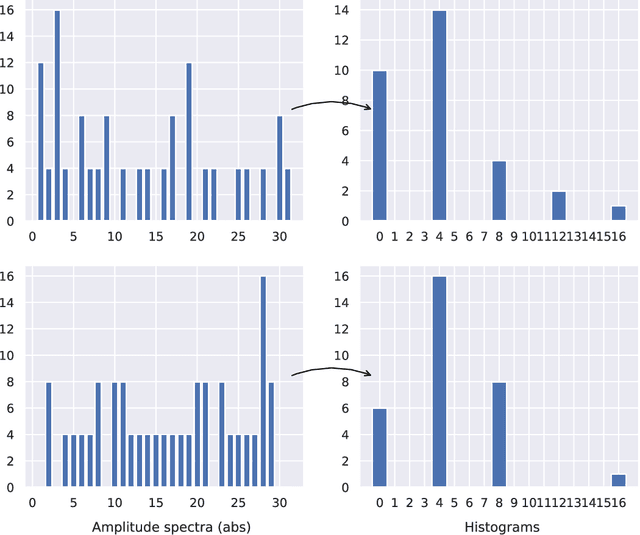
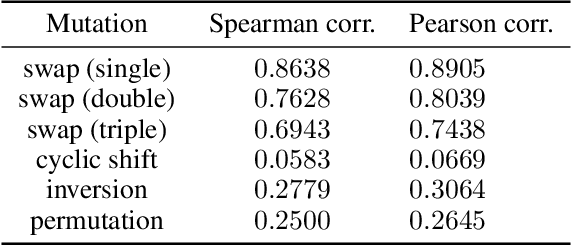
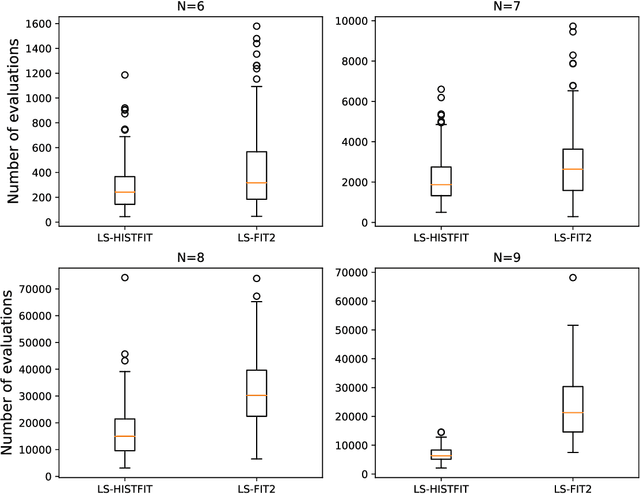
In this paper, we consider the problem of finding perfectly balanced Boolean functions with high non-linearity values. Such functions have extensive applications in domains such as cryptography and error-correcting coding theory. We provide an approach for finding such functions by a local search method that exploits the structure of the underlying problem. Previous attempts in this vein typically focused on using the properties of the fitness landscape to guide the search. We opt for a different path in which we leverage the phenotype landscape (the mapping from genotypes to phenotypes) instead. In the context of the underlying problem, the phenotypes are represented by Walsh-Hadamard spectra of the candidate solutions (Boolean functions). We propose a novel selection criterion, under which the phenotypes are compared directly, and test whether its use increases the convergence speed (measured by the number of required spectra calculations) when compared to a competitive fitness function used in the literature. The results reveal promising convergence speed improvements for Boolean functions of sizes $N=6$ to $N=9$.
Novel ensemble collaboration method for dynamic scheduling problems
Mar 27, 2022
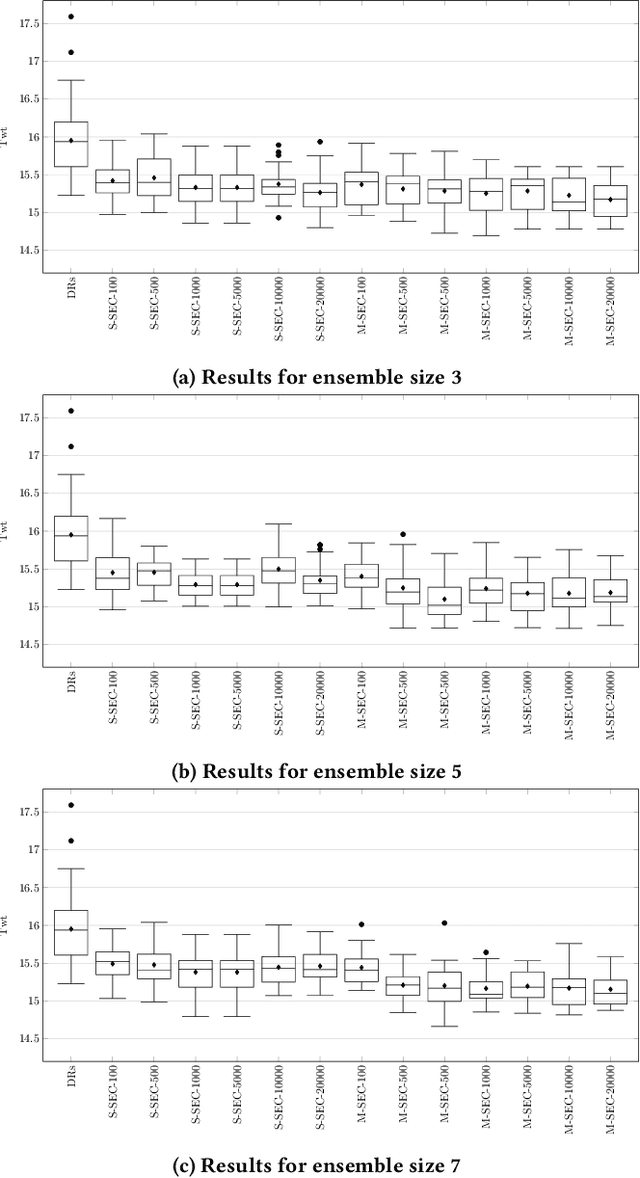
Dynamic scheduling problems are important optimisation problems with many real-world applications. Since in dynamic scheduling not all information is available at the start, such problems are usually solved by dispatching rules (DRs), which create the schedule as the system executes. Recently, DRs have been successfully developed using genetic programming. However, a single DR may not efficiently solve different problem instances. Therefore, much research has focused on using DRs collaboratively by forming ensembles. In this paper, a novel ensemble collaboration method for dynamic scheduling is proposed. In this method, DRs are applied independently at each decision point to create a simulation of the schedule for all currently released jobs. Based on these simulations, it is determined which DR makes the best decision and that decision is applied. The results show that the ensembles easily outperform individual DRs for different ensemble sizes. Moreover, the results suggest that it is relatively easy to create good ensembles from a set of independently evolved DRs.
Heuristic and Metaheuristic Methods for the Unrelated Machines Scheduling Problem: A Survey
Jul 27, 2021
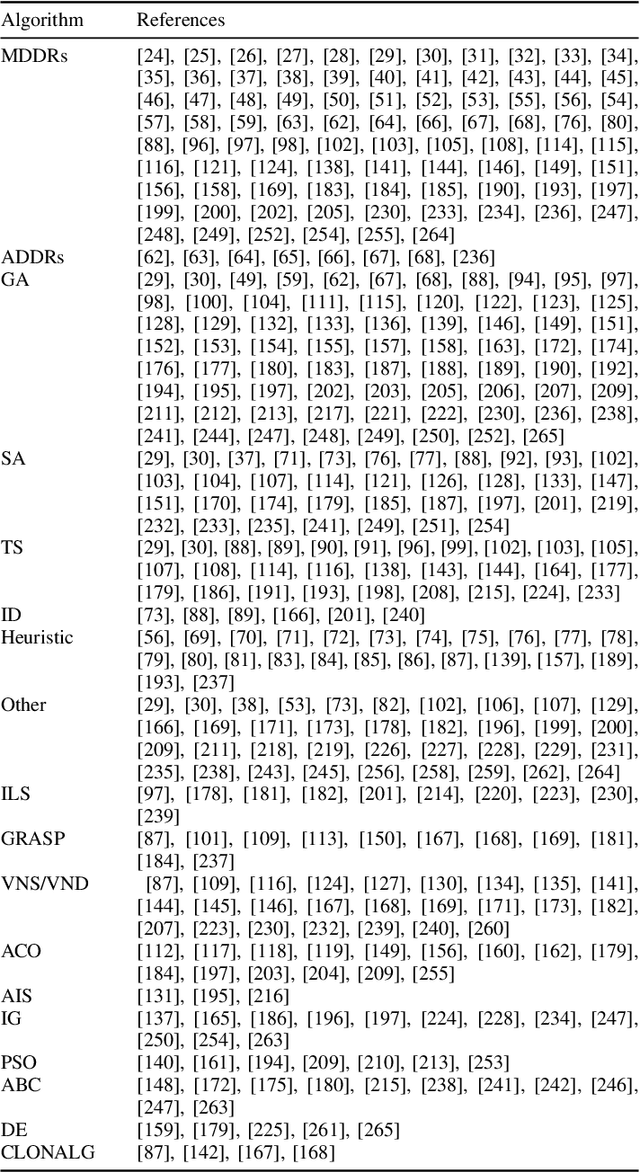
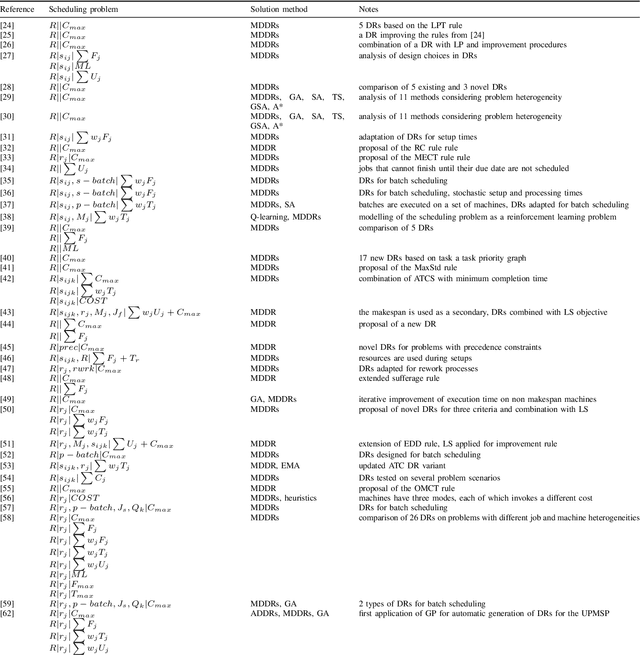
Today scheduling problems have an immense effect on various areas of human lives, be it from their application in manufacturing and production industry, transportation, or workforce allocation. The unrelated parallel machines scheduling problem (UPMSP), which is only one of the many different problem types that exist, found its application in many areas like production industries or distributed computing. Due to the complexity of the problem, heuristic and metaheuristic methods are gaining more attention for solving it. Although this problem variant did not receive much attention as other models, recent years saw the increase of research dealing with this problem. During that time, many different problem variants, solution methods, or other interesting research directions were considered. However, no study has until now tried to systematise the research in which heuristic methods are applied for the UPMSP. The goal of this study is to provide an extensive literature review on the application of heuristic and metaheuristic methods for solving the UPMSP. The research was systematised and classified into several categories to enable an easy overview of the different problem and solution variants. Additionally, current trends and possible future research directions are also shortly outlined.