 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImagination-Augmented Deep Learning for Goal Recognition
Mar 20, 2020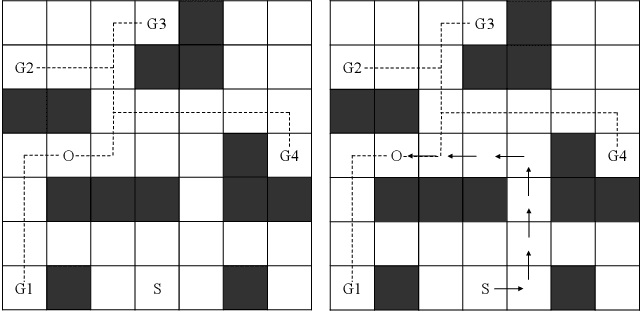
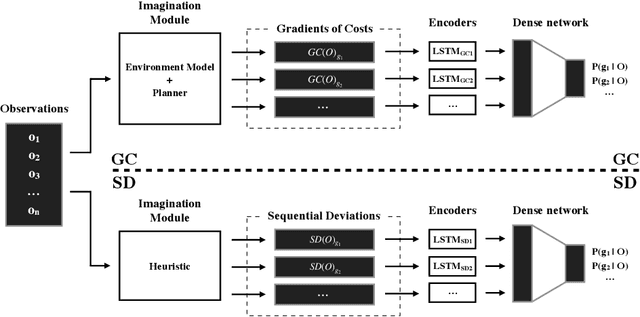
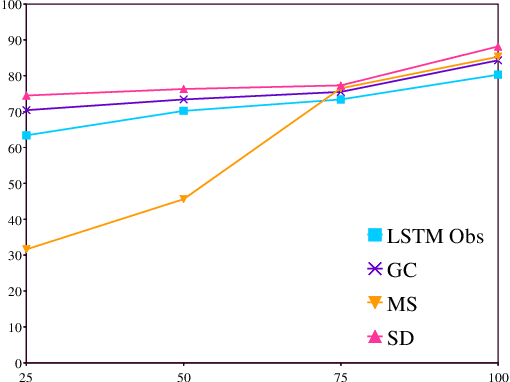
Being able to infer the goal of people we observe, interact with, or read stories about is one of the hallmarks of human intelligence. A prominent idea in current goal-recognition research is to infer the likelihood of an agent's goal from the estimations of the costs of plans to the different goals the agent might have. Different approaches implement this idea by relying only on handcrafted symbolic representations. Their application to real-world settings is, however, quite limited, mainly because extracting rules for the factors that influence goal-oriented behaviors remains a complicated task. In this paper, we introduce a novel idea of using a symbolic planner to compute plan-cost insights, which augment a deep neural network with an imagination capability, leading to improved goal recognition accuracy in real and synthetic domains compared to a symbolic recognizer or a deep-learning goal recognizer alone.
A Transfer Learning Method for Goal Recognition Exploiting Cross-Domain Spatial Features
Nov 22, 2019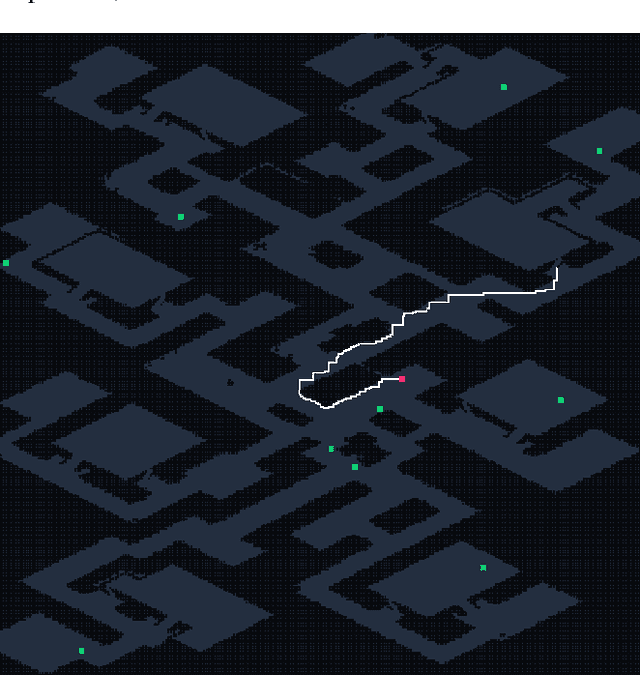



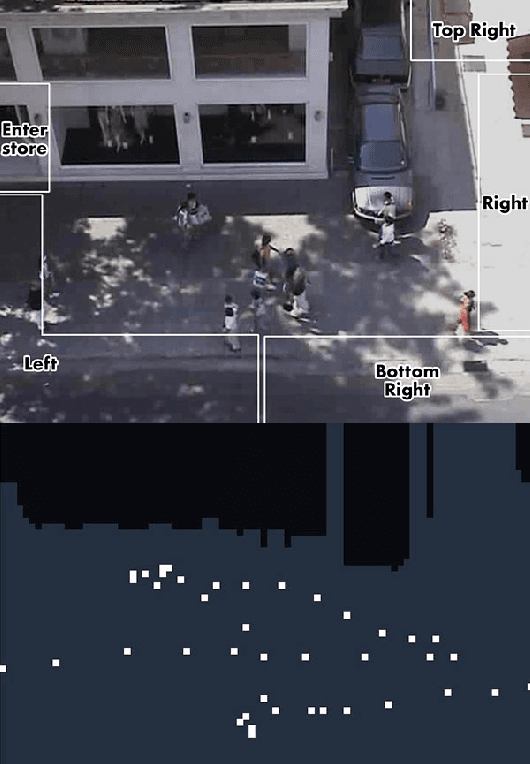
The ability to infer the intentions of others, predict their goals, and deduce their plans are critical features for intelligent agents. For a long time, several approaches investigated the use of symbolic representations and inferences with limited success, principally because it is difficult to capture the cognitive knowledge behind human decisions explicitly. The trend, nowadays, is increasingly focusing on learning to infer intentions directly from data, using deep learning in particular. We are now observing interesting applications of intent classification in natural language processing, visual activity recognition, and emerging approaches in other domains. This paper discusses a novel approach combining few-shot and transfer learning with cross-domain features, to learn to infer the intent of an agent navigating in physical environments, executing arbitrary long sequences of actions to achieve their goals. Experiments in synthetic environments demonstrate improved performance in terms of learning from few samples and generalizing to unseen configurations, compared to a deep-learning baseline approach.
Cost-Based Goal Recognition Meets Deep Learning
Nov 22, 2019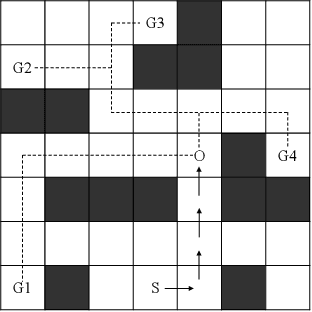

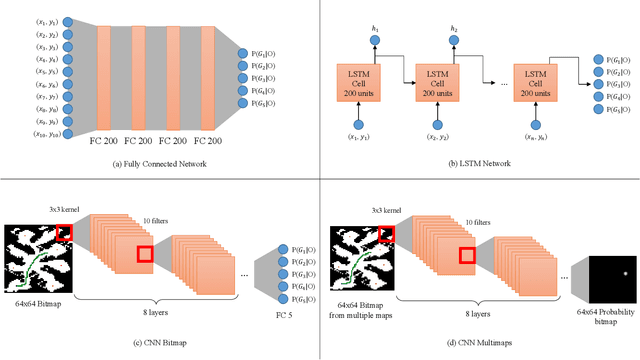
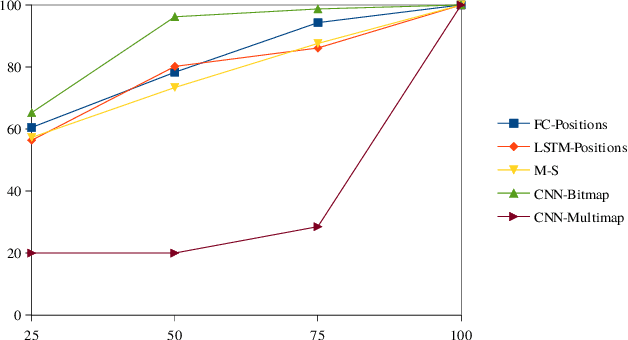
The ability to observe the effects of actions performed by others and to infer their intent, most likely goals, or course of action, is known as a plan or intention recognition cognitive capability and has long been one of the fundamental research challenges in AI. Deep learning has recently been making significant inroads on various pattern recognition problems, except for intention recognition. While extensively explored since the seventies, the problem remains unsolved for most interesting cases in various areas, ranging from natural language understanding to human behavior understanding based on video feeds. This paper compares symbolic inverse planning, one of the most investigated approaches to goal recognition, to deep learning using CNN and LTSM neural network architectures, on five synthetic benchmarks often used in the literature. The results show that the deep learning approach achieves better goal-prediction accuracy and timeliness than the symbolic cost-based plan recognizer in these domains. Although preliminary, these results point to interesting future research avenues.