 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Transfer Learning Method for Goal Recognition Exploiting Cross-Domain Spatial Features
Paper and Code
Nov 22, 2019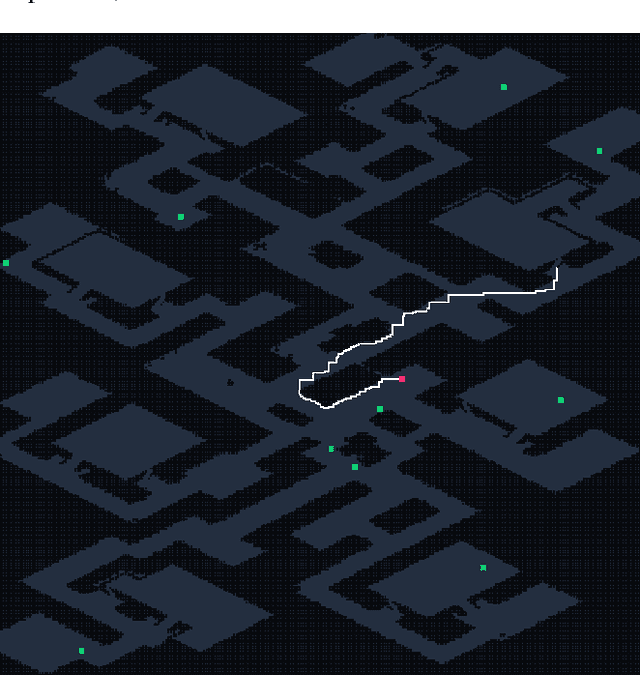



The ability to infer the intentions of others, predict their goals, and deduce their plans are critical features for intelligent agents. For a long time, several approaches investigated the use of symbolic representations and inferences with limited success, principally because it is difficult to capture the cognitive knowledge behind human decisions explicitly. The trend, nowadays, is increasingly focusing on learning to infer intentions directly from data, using deep learning in particular. We are now observing interesting applications of intent classification in natural language processing, visual activity recognition, and emerging approaches in other domains. This paper discusses a novel approach combining few-shot and transfer learning with cross-domain features, to learn to infer the intent of an agent navigating in physical environments, executing arbitrary long sequences of actions to achieve their goals. Experiments in synthetic environments demonstrate improved performance in terms of learning from few samples and generalizing to unseen configurations, compared to a deep-learning baseline approach.