Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Network Based Model Predictive Control for an Autonomous Vehicle
Jul 30, 2021
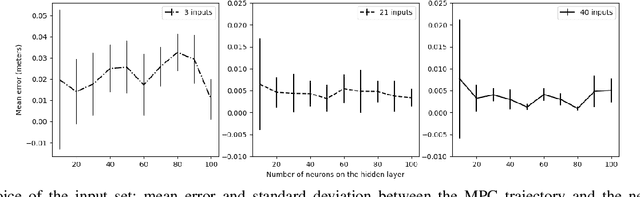
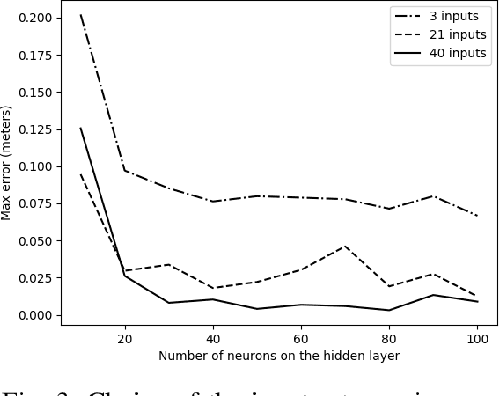

We study learning based controllers as a replacement for model predictive controllers (MPC) for the control of autonomous vehicles. We concentrate for the experiments on the simple yet representative bicycle model. We compare training by supervised learning and by reinforcement learning. We also discuss the neural net architectures so as to obtain small nets with the best performances. This work aims at producing controllers that can both be embedded on real-time platforms and amenable to verification by formal methods techniques.
Via