 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomROS: A ReconROS-based Autonomonous Driving Unit
Sep 05, 2023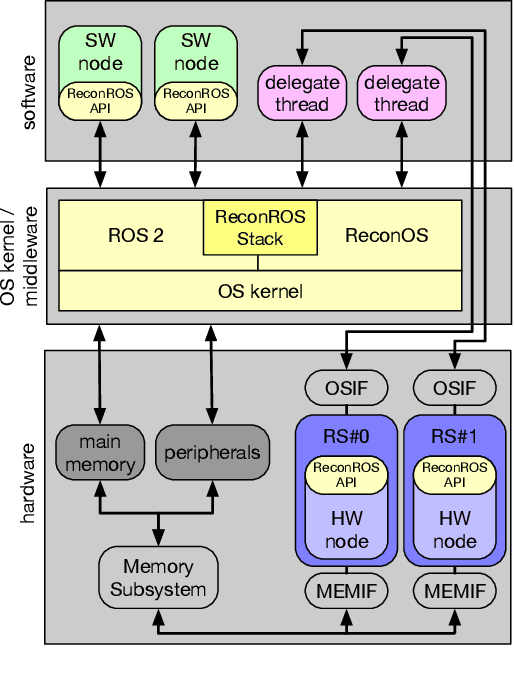
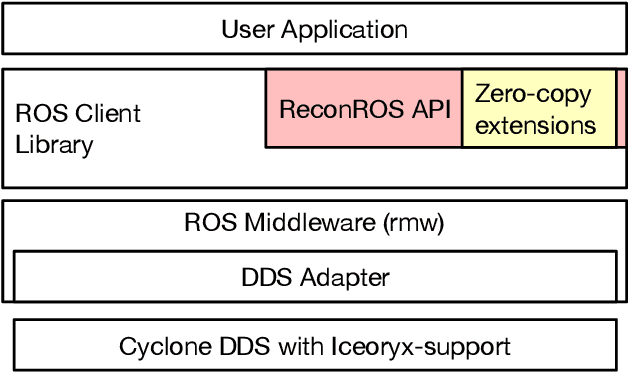
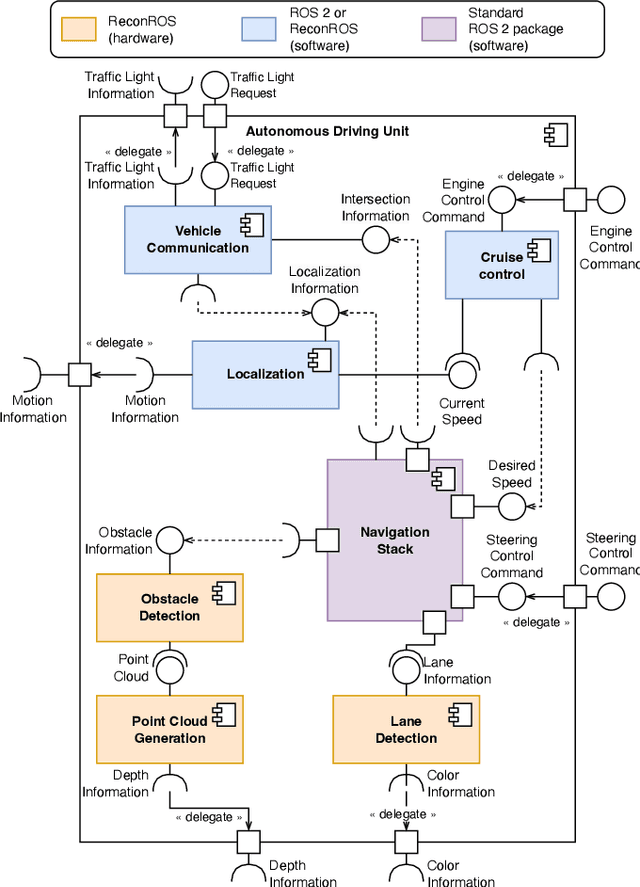
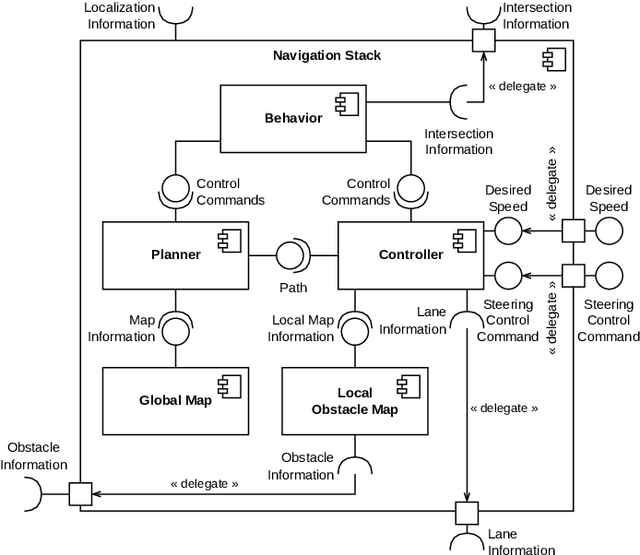
Autonomous driving has become an important research area in recent years, and the corresponding system creates an enormous demand for computations. Heterogeneous computing platforms such as systems-on-chip that combine CPUs with reprogrammable hardware offer both computational performance and flexibility and are thus interesting targets for autonomous driving architectures. The de-facto software architecture standard in robotics, including autonomous driving systems, is ROS 2. ReconROS is a framework for creating robotics applications that extends ROS 2 with the possibility of mapping compute-intense functions to hardware. This paper presents AutonomROS, an autonomous driving unit based on the ReconROS framework. AutonomROS serves as a blueprint for a larger robotics application developed with ReconROS and demonstrates its suitability and extendability. The application integrates the ROS 2 package Navigation 2 with custom-developed software and hardware-accelerated functions for point cloud generation, obstacle detection, and lane detection. In addition, we detail a new communication middleware for shared memory communication between software and hardware functions. We evaluate AutonomROS and show the advantage of hardware acceleration and the new communication middleware for improving turnaround times, achievable frame rates, and, most importantly, reducing CPU load.
Mapping and Optimizing Communication in ROS 2-based Applications on Configurable System-on-Chip Platforms
Jun 22, 2023The robot operating system is the de-facto standard for designing and implementing robotics applications. Several previous works deal with the integration of heterogeneous accelerators into ROS-based applications. One of these approaches is ReconROS, which enables nodes to be completely mapped to hardware. The follow-up work fpgaDDS extends ReconROS by an intra-FPGA data distribution service to process topic-based communication between nodes entirely in hardware. However, the application of this approach is strictly limited to communication between nodes implemented in hardware only. This paper introduces gateways to close the gap between topic communication in hardware and software. Gateways aim to reduce data transfers between hardware and software by synchronizing a hardware-and software-mapped topic. As a result, data must be transferred only once compared to a separate data transmission for each subscribing hardware node in the baseline. Our measurements show significant speedups in multi-subscriber scenarios with large message sizes. From the conclusions of these measurements, we present a methodology for the communication mapping of ROS 2 computation graphs. In the evaluation, an autonomous driving real-world example benefits from the gateway and achieves a speedup of 1.4.
fpgaDDS: An Intra-FPGA Data Distribution Service for ROS 2 Robotics Applications
Mar 01, 2023



Modern computing platforms for robotics applications comprise a set of heterogeneous elements, e.g., multi-core CPUs, embedded GPUs, and FPGAs. FPGAs are reprogrammable hardware devices that allow for fast and energy-efficient computation of many relevant tasks in robotics. ROS is the de-facto programming standard for robotics and decomposes an application into a set of communicating nodes. ReconROS is a previous approach that can map complete ROS nodes into hardware for acceleration. Since ReconROS relies on standard ROS communication layers, exchanging data between hardware-mapped nodes can lead to a performance bottleneck. This paper presents fpgaDDS, a lean data distribution service for hardware-mapped ROS 2 nodes. fpgaDDS relies on a customized and statically generated streaming-based communication architecture. We detail this communication architecture with its components and outline its benefits. We evaluate fpgaDDS on a test example and a larger autonomous vehicle case study. Compared to a ROS 2 application in software, we achieve speedups of up to 13.34 and reduce jitter by two orders of magnitude.
ReconROS Executor: Event-Driven Programming of FPGA-accelerated ROS 2 Applications
Jan 19, 2022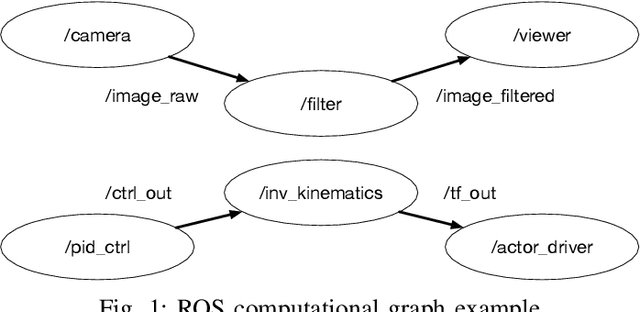
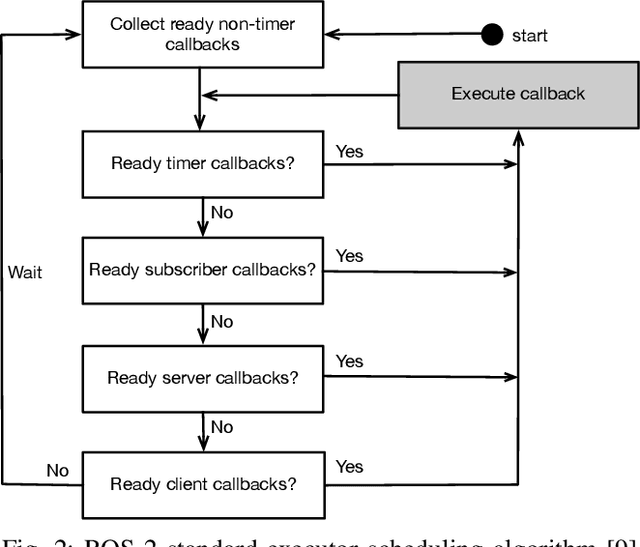
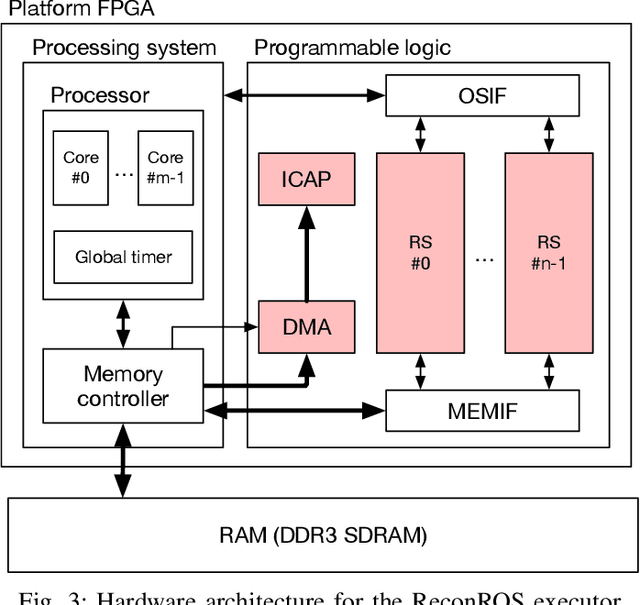
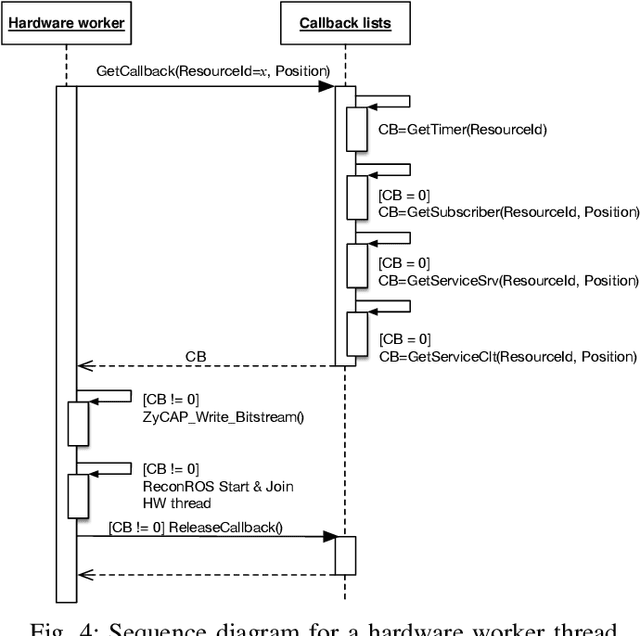
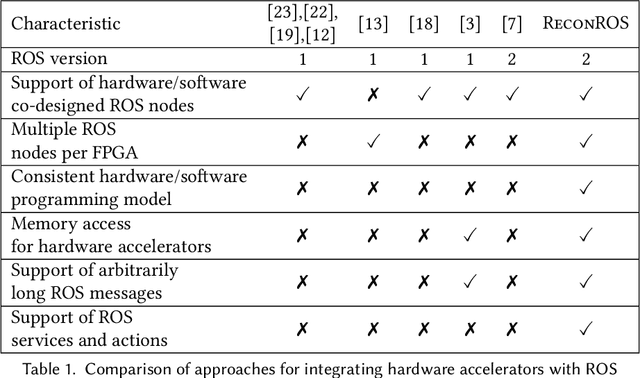
Many applications from the robotics domain can benefit from FPGA acceleration. A corresponding key question is how to integrate hardware accelerators into software-centric robotics programming environments. Recently, several approaches have demonstrated hardware acceleration for the robot operating system (ROS), the dominant programming environment in robotics. ROS is a middleware layer that features the composition of complex robotics applications as a set of nodes that communicate via mechanisms such as publish/subscribe, and distributes them over several compute platforms. In this paper, we present a novel approach for event-based programming of robotics applications that leverages ReconROS, a framework for flexibly mapping ROS 2 nodes to either software or reconfigurable hardware. The ReconROS executor schedules callbacks of ROS 2 nodes and utilizes a reconfigurable slot model and partial runtime reconfiguration to load hardware-based callbacks on demand. We describe the ReconROS executor approach, give design examples, and experimentally evaluate its functionality with examples.
Design of Distributed Reconfigurable Robotics Systems with ReconROS
Jul 15, 2021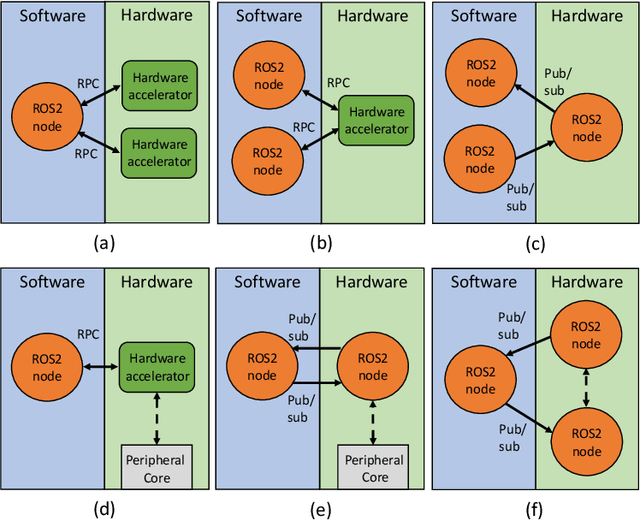
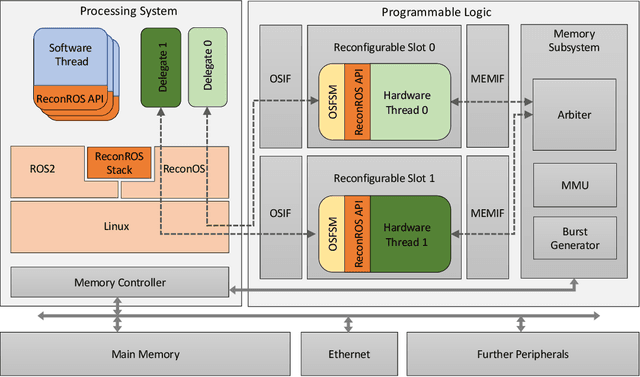
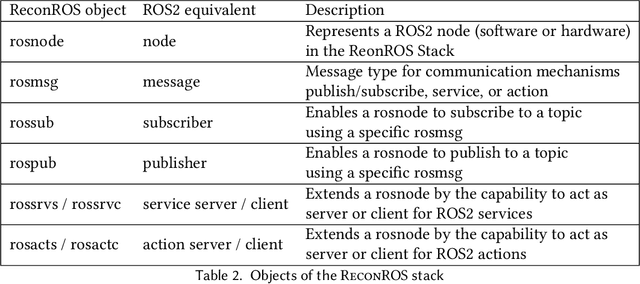
Robotics applications process large amounts of data in real-time and require compute platforms that provide high performance and energy-efficiency. FPGAs are well-suited for many of these applications, but there is a reluctance in the robotics community to use hardware acceleration due to increased design complexity and a lack of consistent programming models across the software/hardware boundary. In this paper we present ReconROS, a framework that integrates the widely-used robot operating system (ROS) with ReconOS, which features multithreaded programming of hardware and software threads for reconfigurable computers. This unique combination gives ROS2 developers the flexibility to transparently accelerate parts of their robotics applications in hardware. We elaborate on the architecture and the design flow for ReconROS and report on a set of experiments that underline the feasibility and flexibility of our approach.