 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReconROS Executor: Event-Driven Programming of FPGA-accelerated ROS 2 Applications
Paper and Code
Jan 19, 2022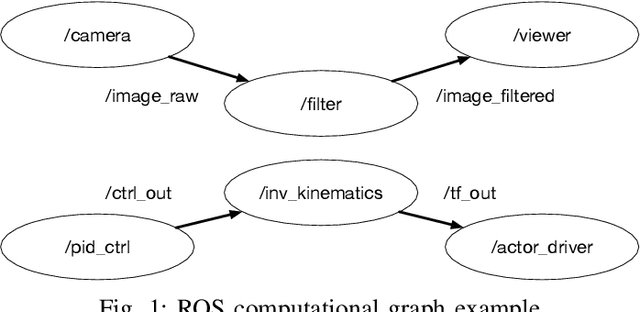
Many applications from the robotics domain can benefit from FPGA acceleration. A corresponding key question is how to integrate hardware accelerators into software-centric robotics programming environments. Recently, several approaches have demonstrated hardware acceleration for the robot operating system (ROS), the dominant programming environment in robotics. ROS is a middleware layer that features the composition of complex robotics applications as a set of nodes that communicate via mechanisms such as publish/subscribe, and distributes them over several compute platforms. In this paper, we present a novel approach for event-based programming of robotics applications that leverages ReconROS, a framework for flexibly mapping ROS 2 nodes to either software or reconfigurable hardware. The ReconROS executor schedules callbacks of ROS 2 nodes and utilizes a reconfigurable slot model and partial runtime reconfiguration to load hardware-based callbacks on demand. We describe the ReconROS executor approach, give design examples, and experimentally evaluate its functionality with examples.