 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Bounding Box Annotation with Small Training Data Sets for Industrial Manufacturing
Jun 01, 2022
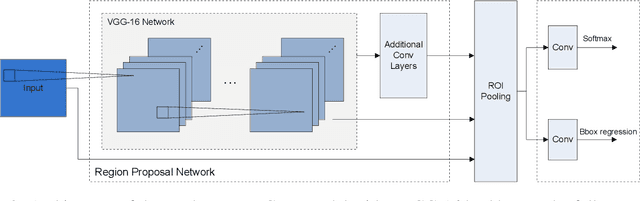
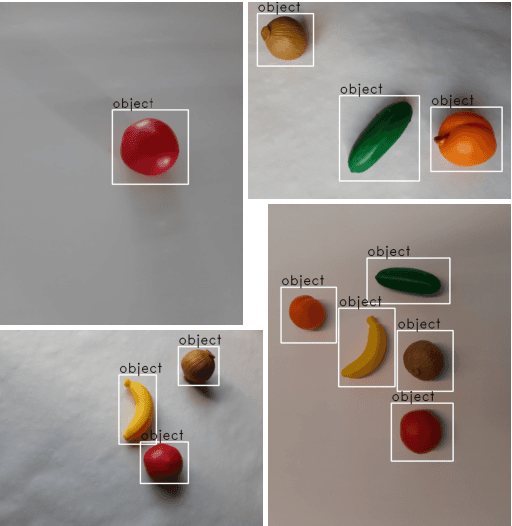
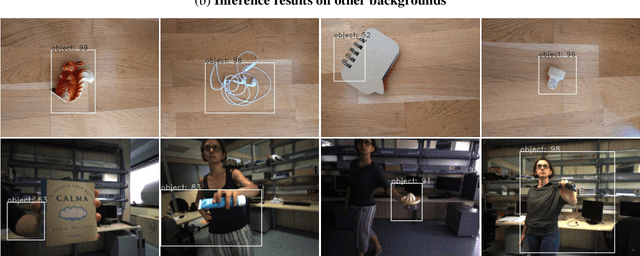
In the past few years, object detection has attracted a lot of attention in the context of human-robot collaboration and Industry 5.0 due to enormous quality improvements in deep learning technologies. In many applications, object detection models have to be able to quickly adapt to a changing environment, i.e., to learn new objects. A crucial but challenging prerequisite for this is the automatic generation of new training data which currently still limits the broad application of object detection methods in industrial manufacturing. In this work, we discuss how to adapt state-of-the-art object detection methods for the task of automatic bounding box annotation for the use case where the background is homogeneous and the object's label is provided by a human. We compare an adapted version of Faster R-CNN and the Scaled Yolov4-p5 architecture and show that both can be trained to distinguish unknown objects from a complex but homogeneous background using only a small amount of training data.
Fast and Automatic Object Registration for Human-Robot Collaboration in Industrial Manufacturing
Apr 01, 2022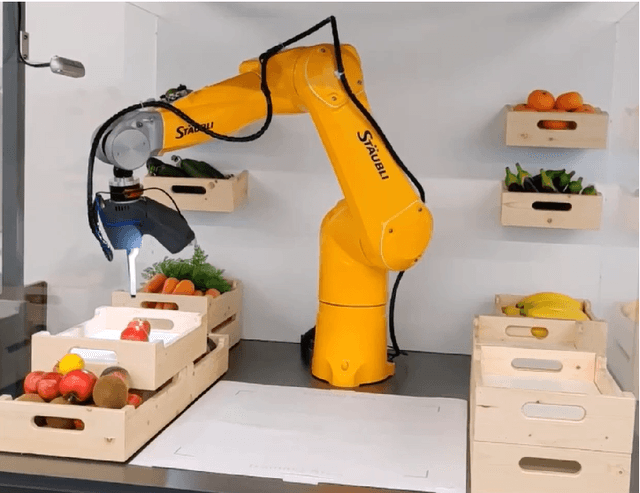
We present an end-to-end framework for fast retraining of object detection models in human-robot-collaboration. Our Faster R-CNN based setup covers the whole workflow of automatic image generation and labeling, model retraining on-site as well as inference on a FPGA edge device. The intervention of a human operator reduces to providing the new object together with its label and starting the training process. Moreover, we present a new loss, the intraspread-objectosphere loss, to tackle the problem of open world recognition. Though it fails to completely solve the problem, it significantly reduces the number of false positive detections of unknown objects.
Explainable AI by BAPC -- Before and After correction Parameter Comparison
Mar 12, 2021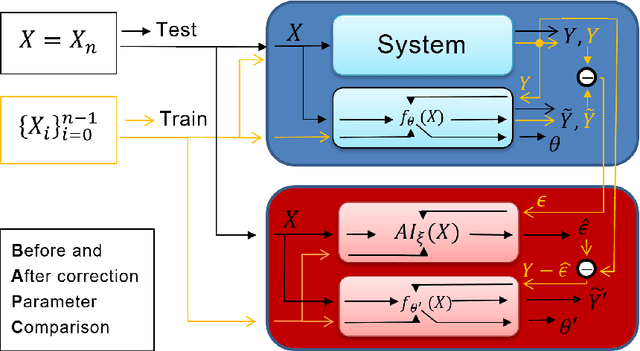
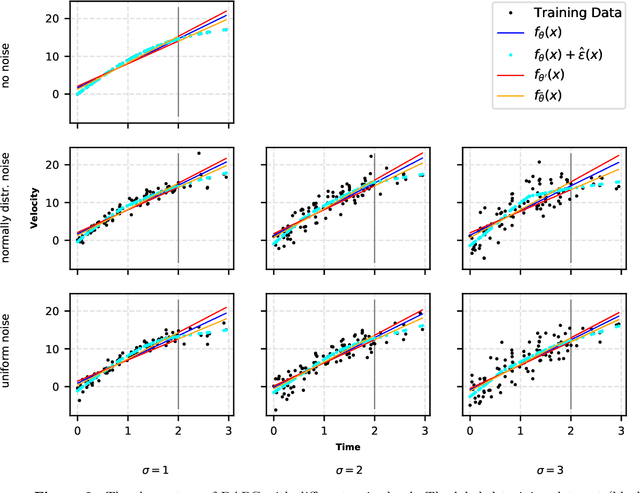


By means of a local surrogate approach, an analytical method to yield explanations of AI-predictions in the framework of regression models is defined. In the case of the AI-model producing additive corrections to the predictions of a base model, the explanations are delivered in the form of a shift of its interpretable parameters as long as the AI- predictions are small in a rigorously defined sense. Criteria are formulated giving a precise relation between lost accuracy and lacking model fidelity. Two applications show how physical or econometric parameters may be used to interpret the action of neural network and random forest models in the sense of the underlying base model. This is an extended version of our paper presented at the ISM 2020 conference, where we first introduced our new approach BAPC.