 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModelFactory: A Matlab/Octave based toolbox to create human body models
Jul 13, 2018



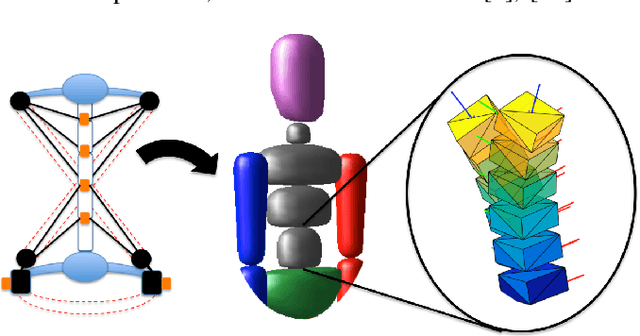
Background: Model-based analysis of movements can help better understand human motor control. Here, the models represent the human body as an articulated multi-body system that reflects the characteristics of the human being studied. Results: We present an open-source toolbox that allows for the creation of human models with easy-to-setup, customizable configurations. The toolbox scripts are written in Matlab/Octave and provide a command-based interface as well as a graphical interface to construct, visualize and export models. Built-in software modules provide functionalities such as automatic scaling of models based on subject height and weight, custom scaling of segment lengths, mass and inertia, addition of body landmarks, and addition of motion capture markers. Users can set up custom definitions of joints, segments and other body properties using the many included examples as templates. In addition to the human, any number of objects (e.g. exoskeletons, orthoses, prostheses, boxes) can be added to the modeling environment. Conclusions: The ModelFactory toolbox is published as open-source software under the permissive zLib license. The toolbox fulfills an important function by making it easier to create human models, and should be of interest to human movement researchers. This document is the author's version of this article.
Optimizing wearable assistive devices with neuromuscular models and optimal control
Apr 09, 2018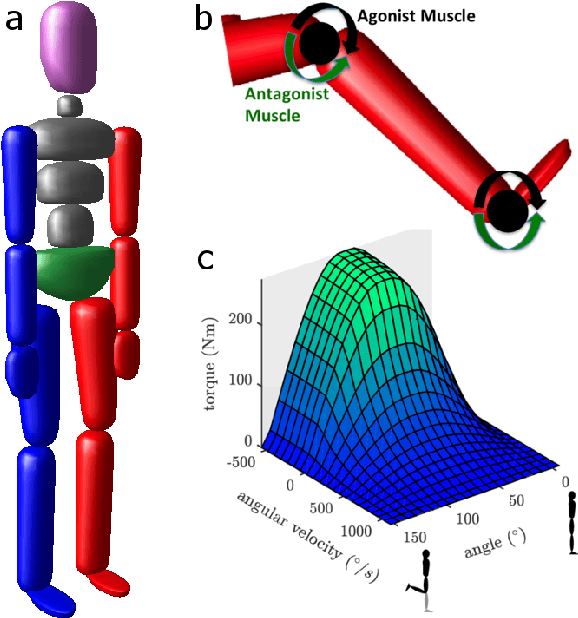
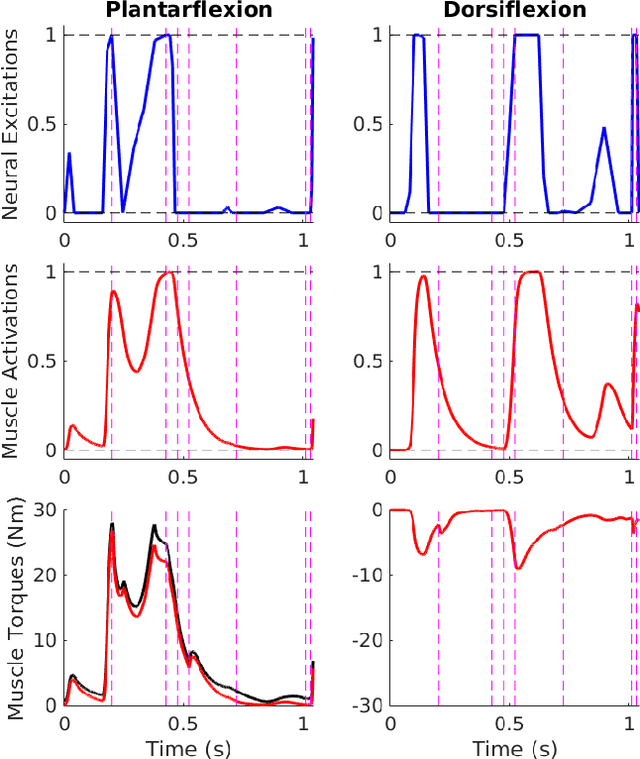
The coupling of human movement dynamics with the function and design of wearable assistive devices is vital to better understand the interaction between the two. Advanced neuromuscular models and optimal control formulations provide the possibility to study and improve this interaction. In addition, optimal control can also be used to generate predictive simulations that generate novel movements for the human model under varying optimization criterion.
Motion optimization and parameter identification for a human and lower-back exoskeleton model
Mar 15, 2018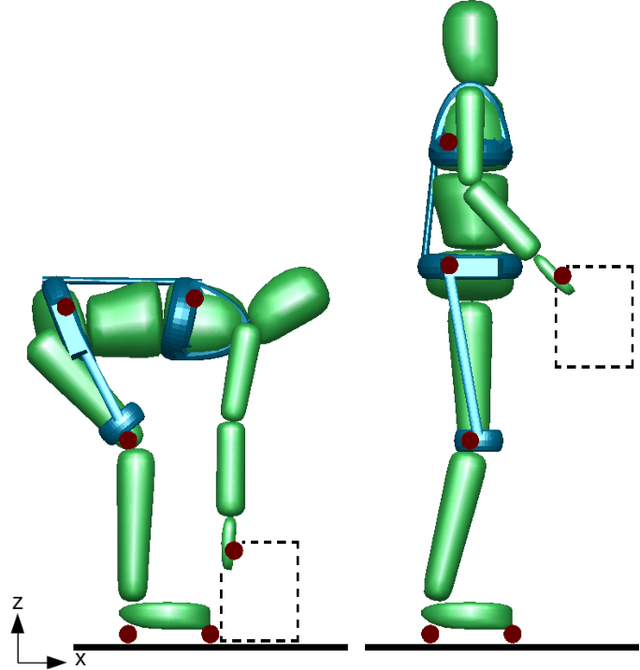
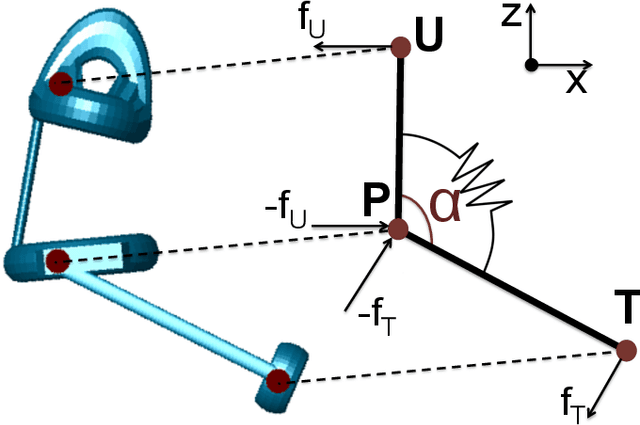
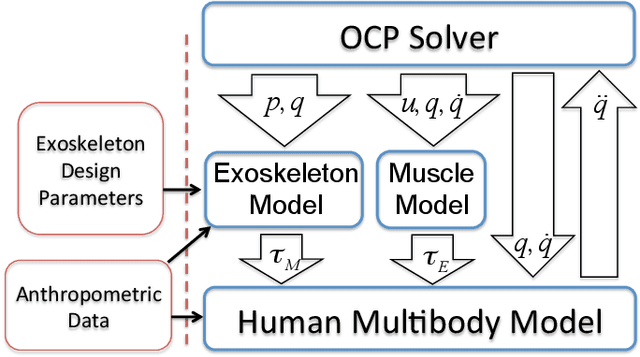
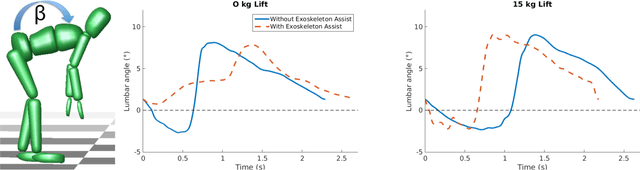
Designing an exoskeleton to reduce the risk of low-back injury during lifting is challenging. Computational models of the human-robot system coupled with predictive movement simulations can help to simplify this design process. Here, we present a study that models the interaction between a human model actuated by muscles and a lower-back exoskeleton. We provide a computational framework for identifying the spring parameters of the exoskeleton using an optimal control approach and forward-dynamics simulations. This is applied to generate dynamically consistent bending and lifting movements in the sagittal plane. Our computations are able to predict motions and forces of the human and exoskeleton that are within the torque limits of a subject. The identified exoskeleton could also yield a considerable reduction of the peak lower-back torques as well as the cumulative lower-back load during the movements. This work is relevant to the research communities working on human-robot interaction, and can be used as a basis for a better human-centered design process.