Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom gymnastics to virtual nonholonomic constraints: energy injection, dissipation, and regulation for the acrobot
Oct 11, 2024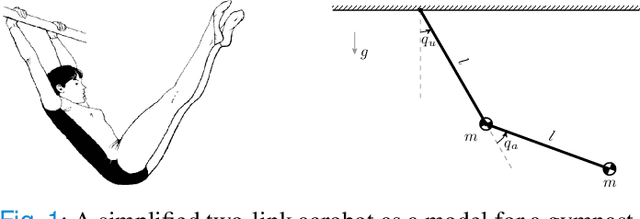
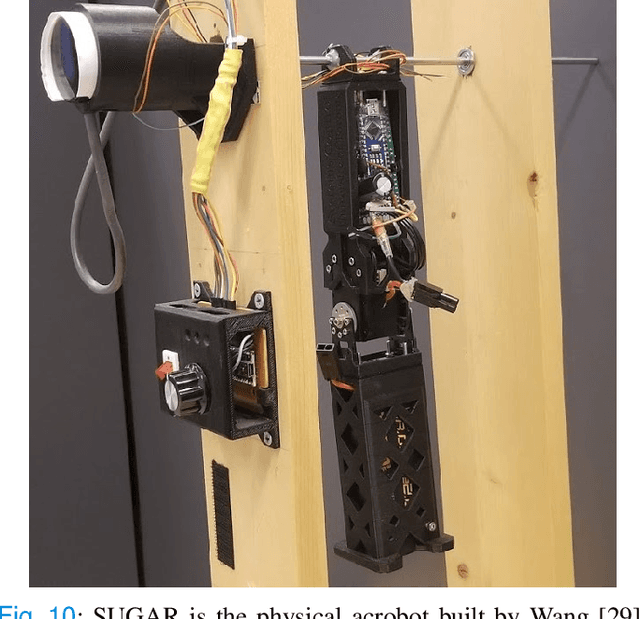
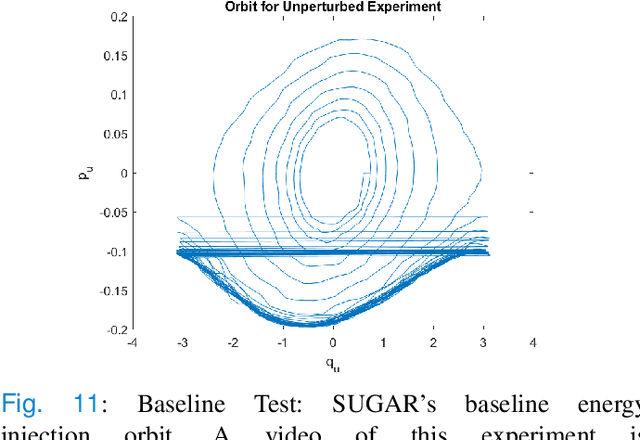
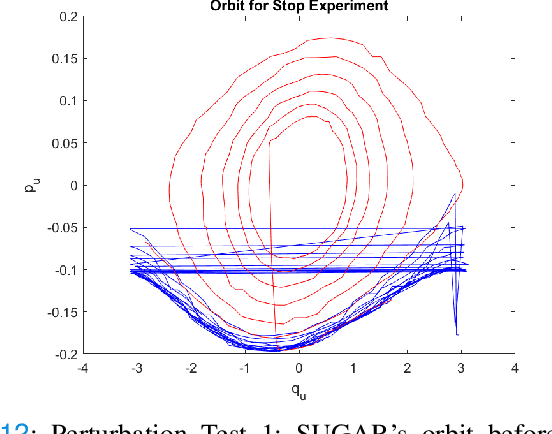
In this article we study virtual nonholonomic constraints, which are relations between the generalized coordinates and momenta of a mechanical system that can be enforced via feedback control. We design a constraint which emulates gymnastics giant motion in an acrobot, and prove that this constraint can inject or dissipate energy based on the sign of a design parameter. The proposed constraint is tested both in simulation and experimentally on a real-world acrobot, demonstrating highly effective energy regulation properties and robustness to a variety of disturbances.
* IEEE Transactions on Control Systems Technology, 32: 47-60, 2024
Via