 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Object Detection in Occluded Environment with Background Cluttering Effects Using Deep Learning
Jan 02, 2024



Detection of small, undetermined moving objects or objects in an occluded environment with a cluttered background is the main problem of computer vision. This greatly affects the detection accuracy of deep learning models. To overcome these problems, we concentrate on deep learning models for real-time detection of cars and tanks in an occluded environment with a cluttered background employing SSD and YOLO algorithms and improved precision of detection and reduce problems faced by these models. The developed method makes the custom dataset and employs a preprocessing technique to clean the noisy dataset. For training the developed model we apply the data augmentation technique to balance and diversify the data. We fine-tuned, trained, and evaluated these models on the established dataset by applying these techniques and highlighting the results we got more accurately than without applying these techniques. The accuracy and frame per second of the SSD-Mobilenet v2 model are higher than YOLO V3 and YOLO V4. Furthermore, by employing various techniques like data enhancement, noise reduction, parameter optimization, and model fusion we improve the effectiveness of detection and recognition. We further added a counting algorithm, and target attributes experimental comparison, and made a graphical user interface system for the developed model with features of object counting, alerts, status, resolution, and frame per second. Subsequently, to justify the importance of the developed method analysis of YOLO V3, V4, and SSD were incorporated. Which resulted in the overall completion of the proposed method.
Experimental Comparison of SNR and RSSI for LoRa-ESL Based on Machine Clustering and Arithmetic Distribution
Oct 27, 2022



LoRa lacks the sensing capabilities of channel status. Received signal strength indicator (RSSI) decreases due to collision, interference, and near-far effect while for signal-to-noise ratio (SNR), the packets are rejected by decreasing the transmission power (TP) at a higher spreading factor (SF). To overcome these challenges in the case of electric shelf label (ESL) to minimize the dependency on retransmission and acknowledgment, the end devices (EDs) are allocated around gateways (GWs) based on machine clustering with dynamic SF for SNR while dynamic TP for RSSI. The experimental results determined that the RSSI approach is more dominant than SNR because of determining the exact locality of the ED that diminished the capture effect. Arithmetic distribution of EDs for various GWs in different clusters helps to minify the near-far effect. The resultant received power (RP) at each cluster is higher for most of the connected EDs than the threshold RP.
Object Recognition in Different Lighting Conditions at Various Angles by Deep Learning Method
Oct 18, 2022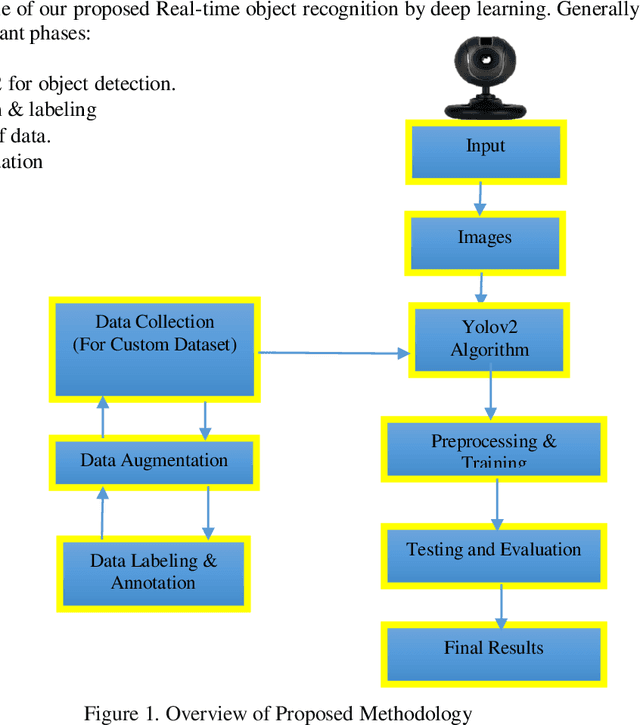

Existing computer vision and object detection methods strongly rely on neural networks and deep learning. This active research area is used for applications such as autonomous driving, aerial photography, protection, and monitoring. Futuristic object detection methods rely on rectangular, boundary boxes drawn over an object to accurately locate its location. The modern object recognition algorithms, however, are vulnerable to multiple factors, such as illumination, occlusion, viewing angle, or camera rotation as well as cost. Therefore, deep learning-based object recognition will significantly increase the recognition speed and compatible external interference. In this study, we use convolutional neural networks (CNN) to recognize items, the neural networks have the advantages of end-to-end, sparse relation, and sharing weights. This article aims to classify the name of the various object based on the position of an object's detected box. Instead, under different distances, we can get recognition results with different confidence. Through this study, we find that this model's accuracy through recognition is mainly influenced by the proportion of objects and the number of samples. When we have a small proportion of an object on camera, then we get higher recognition accuracy; if we have a much small number of samples, we can get greater accuracy in recognition. The epidemic has a great impact on the world economy where designing a cheaper object recognition system is the need of time.