 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperbolic Embeddings for Learning Options in Hierarchical Reinforcement Learning
Dec 04, 2018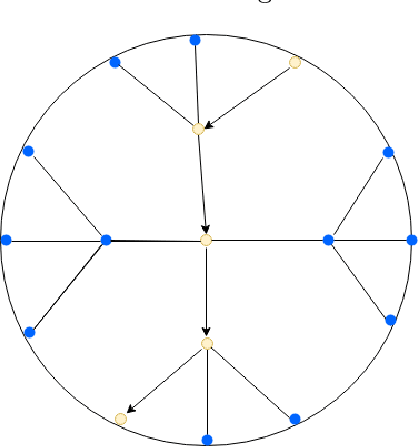
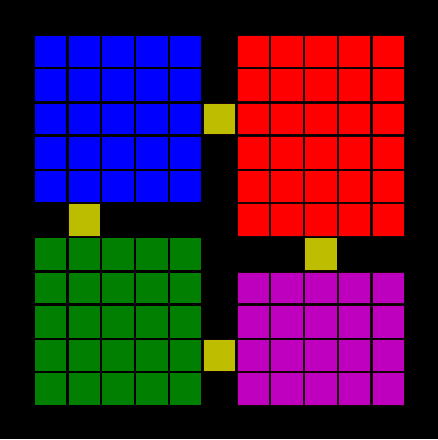
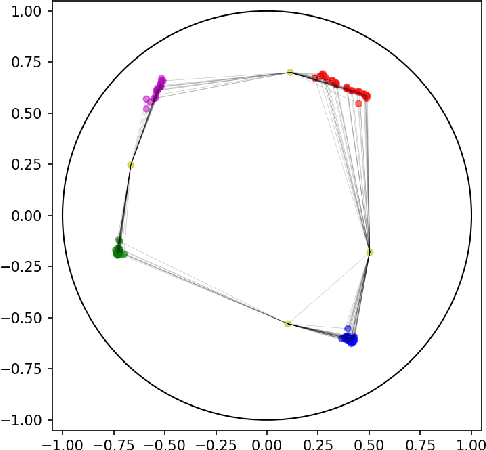
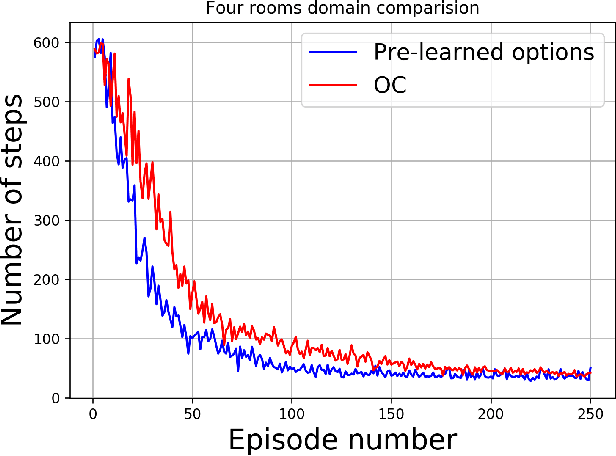
Hierarchical reinforcement learning deals with the problem of breaking down large tasks into meaningful sub-tasks. Autonomous discovery of these sub-tasks has remained a challenging problem. We propose a novel method of learning sub-tasks by combining paradigms of routing in computer networks and graph based skill discovery within the options framework to define meaningful sub-goals. We apply the recent advancements of learning embeddings using Riemannian optimisation in the hyperbolic space to embed the state set into the hyperbolic space and create a model of the environment. In doing so we enforce a global topology on the states and are able to exploit this topology to learn meaningful sub-tasks. We demonstrate empirically, both in discrete and continuous domains, how these embeddings can improve the learning of meaningful sub-tasks.