 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Role of Machine Learning for Trajectory Prediction in Cooperative Driving
Oct 21, 2020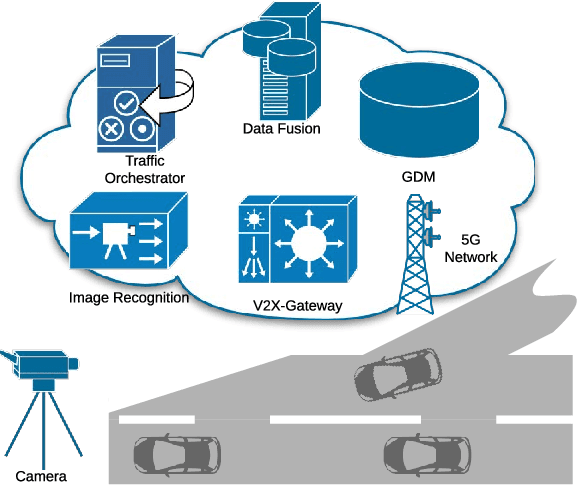
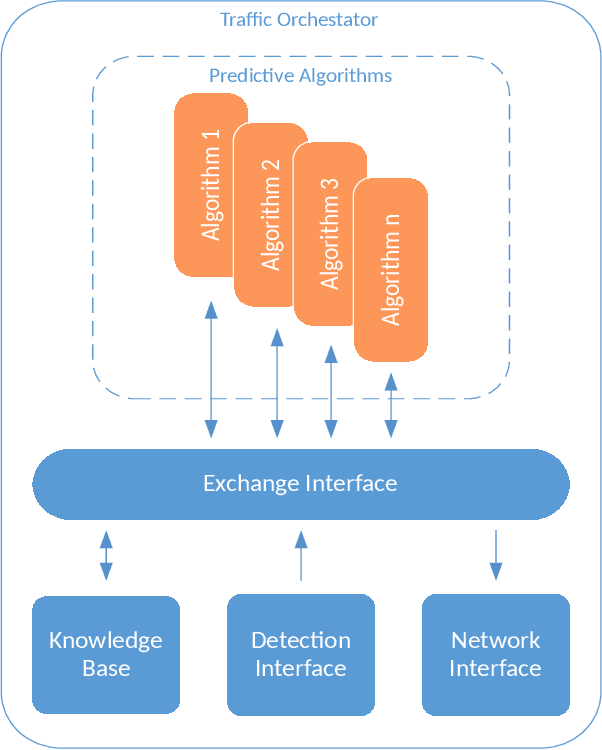

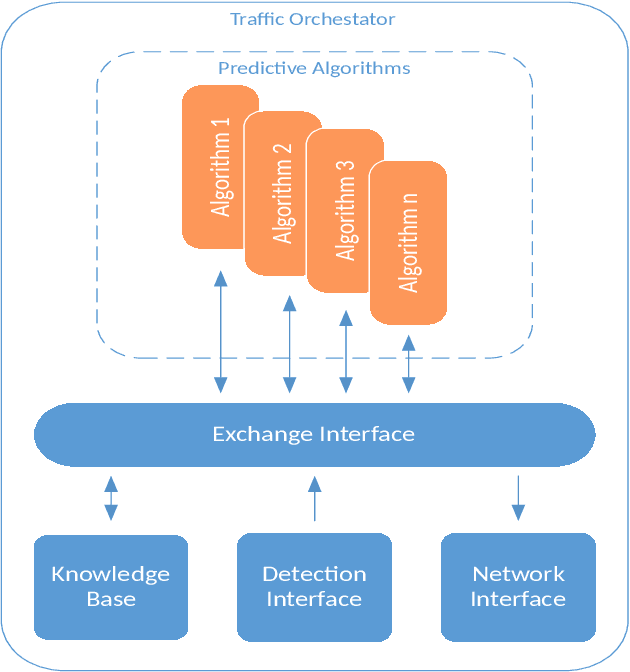
In this paper, we study the role that machine learning can play in cooperative driving. Given the increasing rate of connectivity in modern vehicles, and road infrastructure, cooperative driving is a promising first step in automated driving. The example scenario we explored in this paper, is coordinated lane merge, with data collection, test and evaluation all conducted in an automotive test track. The assumption is that vehicles are a mix of those equipped with communication units on board, i.e. connected vehicles, and those that are not connected. However, roadside cameras are connected and can capture all vehicles including those without connectivity. We develop a Traffic Orchestrator that suggests trajectories based on these two sources of information, i.e. connected vehicles, and connected roadside cameras. Recommended trajectories are built, which are then communicated back to the connected vehicles. We explore the use of different machine learning techniques in accurately and timely prediction of trajectories.
* arXiv admin note: text overlap with arXiv:2010.10426
Deep Reinforcement Learning in Lane Merge Coordination for Connected Vehicles
Oct 20, 2020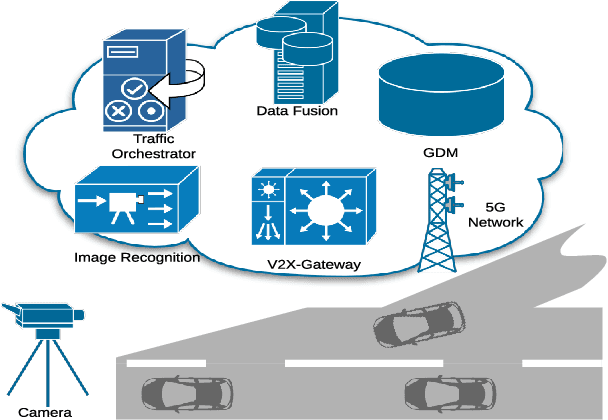
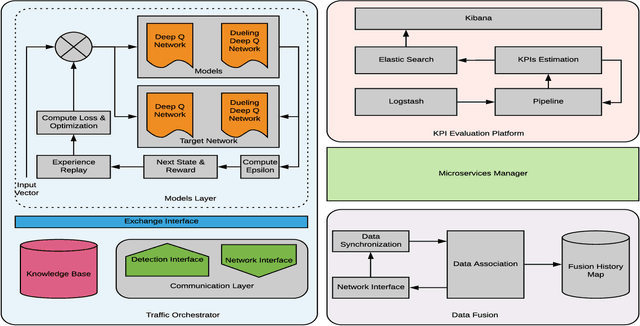
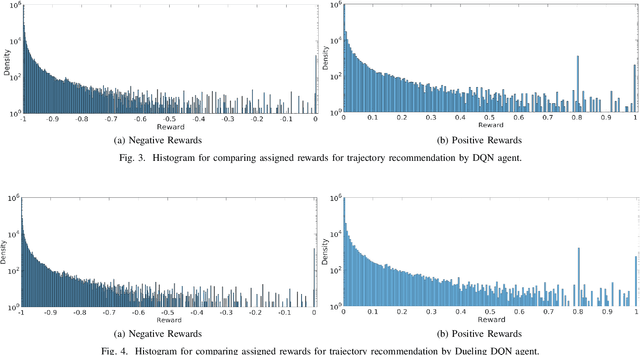
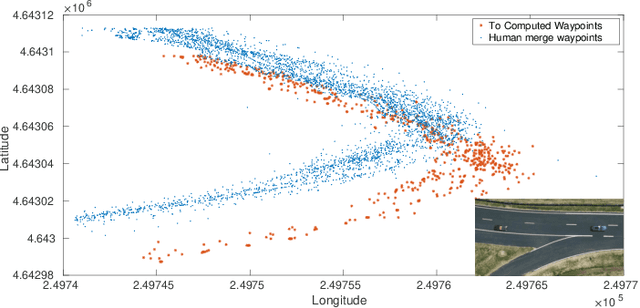
In this paper, a framework for lane merge coordination is presented utilising a centralised system, for connected vehicles. The delivery of trajectory recommendations to the connected vehicles on the road is based on a Traffic Orchestrator and a Data Fusion as the main components. Deep Reinforcement Learning and data analysis is used to predict trajectory recommendations for connected vehicles, taking into account unconnected vehicles for those suggestions. The results highlight the adaptability of the Traffic Orchestrator, when employing Dueling Deep Q-Network in an unseen real world merging scenario. A performance comparison of different reinforcement learning models and evaluation against Key Performance Indicator (KPI) are also presented.
A Lane Merge Coordination Model for a V2X Scenario
Oct 20, 2020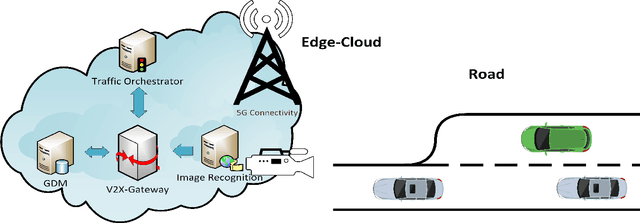

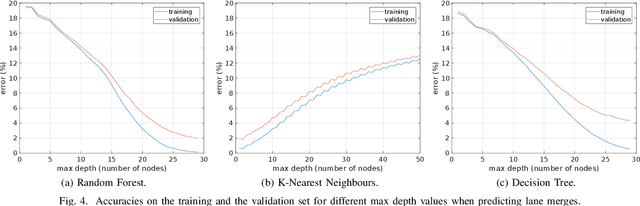
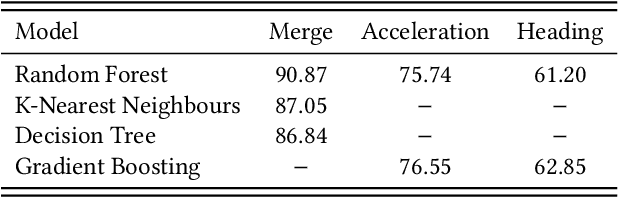
Cooperative driving using connectivity services has been a promising avenue for autonomous vehicles, with the low latency and further reliability support provided by 5th Generation Mobile Network (5G). In this paper, we present an application for lane merge coordination based on a centralised system, for connected cars. This application delivers trajectory recommendations to the connected vehicles on the road. The application comprises of a Traffic Orchestrator as the main component. We apply machine learning and data analysis to predict whether a connected vehicle can successfully complete the cooperative manoeuvre of a lane merge. Furthermore, the acceleration and heading parameters that are necessary for the completion of a safe merge are elaborated. The results demonstrate the performance of several existing algorithms and how their main parameters were selected to avoid over-fitting.