 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Framework of Transfer Learning in Object Detection for Embedded Systems
Nov 24, 2018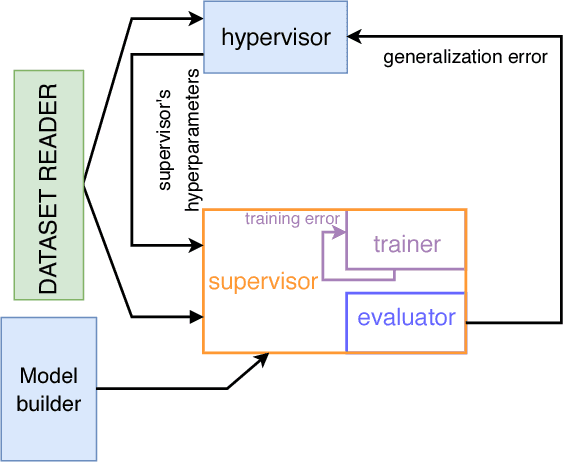
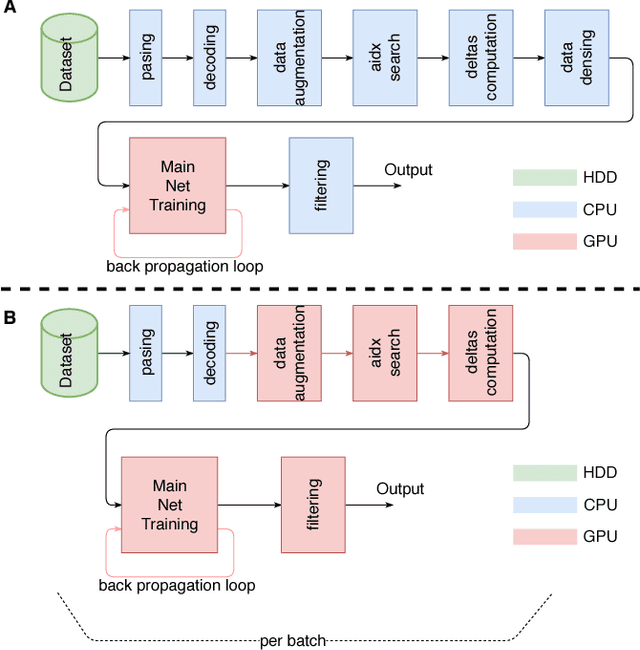
Transfer learning is one of the subjects undergoing intense study in the area of machine learning. In object recognition and object detection there are known experiments for the transferability of parameters, but not for neural networks which are suitable for object detection in real time embedded applications, such as the SqueezeDet neural network. We use transfer learning to accelerate the training of SqueezeDet to a new group of classes. Also, experiments are conducted to study the transferability and co-adaptation phenomena introduced by the transfer learning process. To accelerate training, we propose a new implementation of the SqueezeDet training which provides a faster pipeline for data processing and achieves 1.8 times speedup compared to the initial implementation. Finally, we created a mechanism for automatic hyperparameter optimization using an empirical method.
Metric Map Merging using RFID Tags & Topological Information
Nov 17, 2017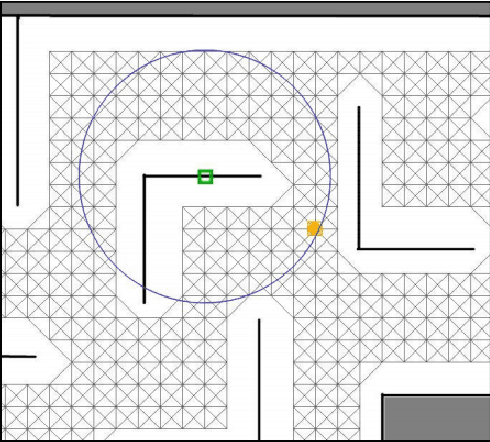
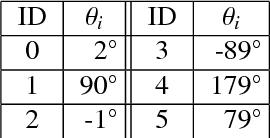
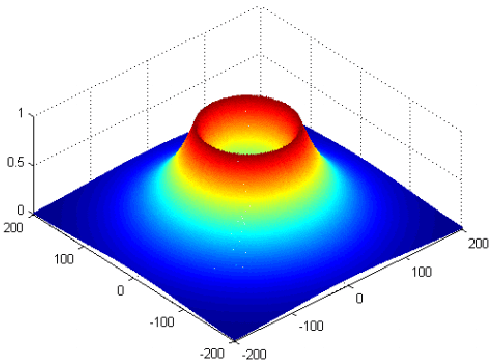
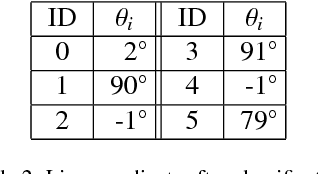
A map merging component is crucial for the proper functionality of a multi-robot system performing exploration, since it provides the means to integrate and distribute the most important information carried by the agents: the explored-covered space and its exact (depending on the SLAM accuracy) morphology. Map merging is a prerequisite for an intelligent multi-robot team aiming to deploy a smart exploration technique. In the current work, a metric map merging approach based on environmental information is proposed, in conjunction with spatially scattered RFID tags localization. This approach is divided into the following parts: the maps approximate rotation calculation via the obstacles poses and localized RFID tags, the translation employing the best localized common RFID tag and finally the transformation refinement using an ICP algorithm.