 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Target-based Multi-LiDAR Multi-Camera Extrinsic Calibration System
Jul 22, 2025Extrinsic Calibration represents the cornerstone of autonomous driving. Its accuracy plays a crucial role in the perception pipeline, as any errors can have implications for the safety of the vehicle. Modern sensor systems collect different types of data from the environment, making it harder to align the data. To this end, we propose a target-based extrinsic calibration system tailored for a multi-LiDAR and multi-camera sensor suite. This system enables cross-calibration between LiDARs and cameras with limited prior knowledge using a custom ChArUco board and a tailored nonlinear optimization method. We test the system with real-world data gathered in a warehouse. Results demonstrated the effectiveness of the proposed method, highlighting the feasibility of a unique pipeline tailored for various types of sensors.
Direct Bézier-Based Trajectory Planner for Improved Local Exploration of Unknown Environments
Mar 02, 2022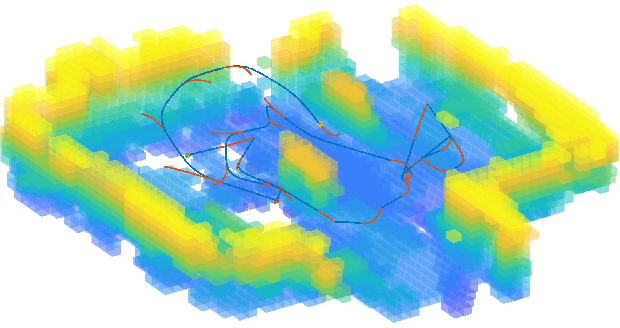
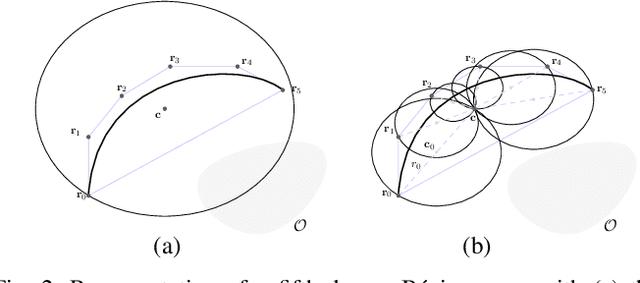
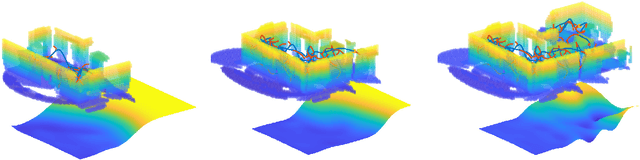
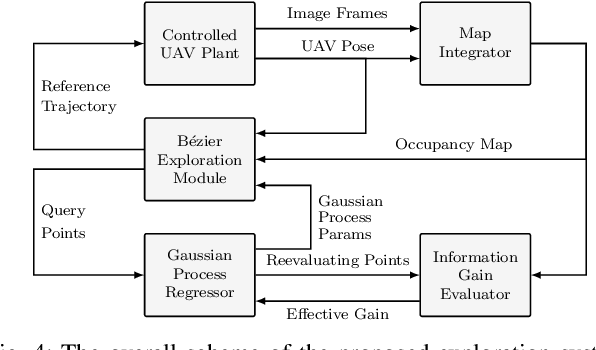
Autonomous exploration is an essential capability for mobile robots, as the majority of their applications require the ability to efficiently collect information about their surroundings. In the literature, there are several approaches, ranging from frontier-based methods to hybrid solutions involving the ability to plan both local and global exploring paths, but only few of them focus on improving local exploration by properly tuning the planned trajectory, often leading to "stop-and-go" like behaviors. In this work we propose a novel RRT-inspired B\'ezier-based next-best-view trajectory planner able to deal with the problem of fast local exploration. Gaussian process inference is used to guarantee fast exploration gain retrieval while still being consistent with the exploration task. The proposed approach is compared with other available state-of-the-art algorithms and tested in a real-world scenario. The implemented code is publicly released as open-source code to encourage further developments and benchmarking.
UAV-Based Search and Rescue in Avalanches using ARVA: An Extremum Seeking Approach
Jun 28, 2021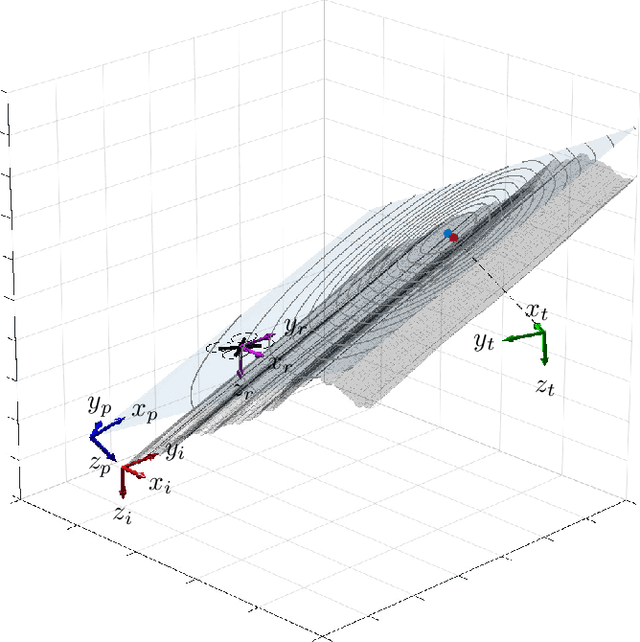
This work deals with the problem of localizing a victim buried by an avalanche by means of a drone equipped with an ARVA (Appareil de Recherche de Victimes d'Avalanche) sensor. The proposed control solution is based on a "model-free" extremum seeking strategy which is shown to succeed in steering the drone in a neighborhood of the victim position. The effectiveness and robustness of the proposed algorithm is tested in Gazebo simulation environment, where a new flight mode and a new controller module have been implemented as an extension of the well-known PX4 open source flight stack. Finally, to test usability, we present hardware-in-the-loop simulations on a Pixhawk 2 Cube board.