 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph-Fused Vision-Language-Action for Policy Reasoning in Multi-Arm Robotic Manipulation
Sep 09, 2025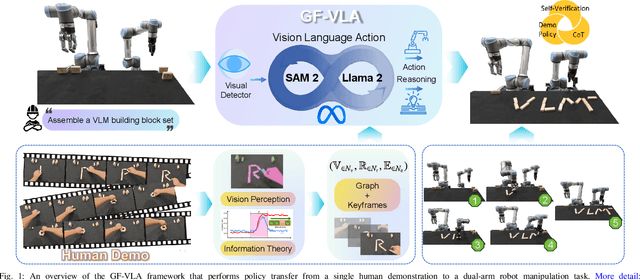
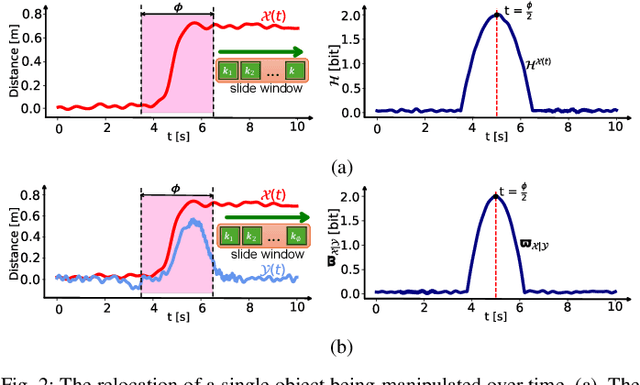
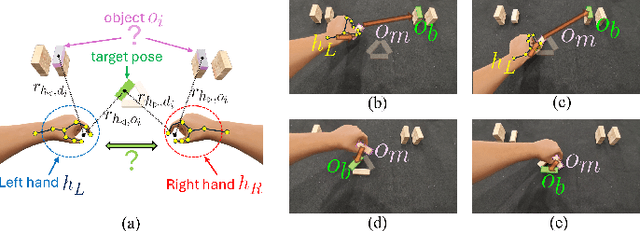
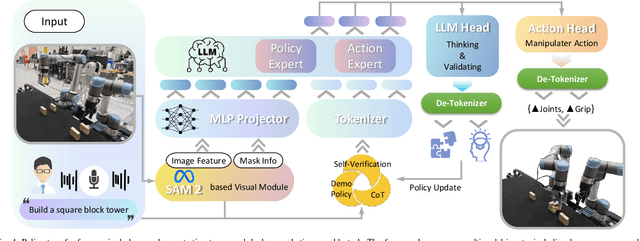
Acquiring dexterous robotic skills from human video demonstrations remains a significant challenge, largely due to conventional reliance on low-level trajectory replication, which often fails to generalize across varying objects, spatial layouts, and manipulator configurations. To address this limitation, we introduce Graph-Fused Vision-Language-Action (GF-VLA), a unified framework that enables dual-arm robotic systems to perform task-level reasoning and execution directly from RGB-D human demonstrations. GF-VLA employs an information-theoretic approach to extract task-relevant cues, selectively highlighting critical hand-object and object-object interactions. These cues are structured into temporally ordered scene graphs, which are subsequently integrated with a language-conditioned transformer to produce hierarchical behavior trees and interpretable Cartesian motion primitives. To enhance efficiency in bimanual execution, we propose a cross-arm allocation strategy that autonomously determines gripper assignment without requiring explicit geometric modeling. We validate GF-VLA on four dual-arm block assembly benchmarks involving symbolic structure construction and spatial generalization. Empirical results demonstrate that the proposed representation achieves over 95% graph accuracy and 93% subtask segmentation, enabling the language-action planner to generate robust, interpretable task policies. When deployed on a dual-arm robot, these policies attain 94% grasp reliability, 89% placement accuracy, and 90% overall task success across stacking, letter-formation, and geometric reconfiguration tasks, evidencing strong generalization and robustness under diverse spatial and semantic variations.
Information-Theoretic Graph Fusion with Vision-Language-Action Model for Policy Reasoning and Dual Robotic Control
Aug 07, 2025Teaching robots dexterous skills from human videos remains challenging due to the reliance on low-level trajectory imitation, which fails to generalize across object types, spatial layouts, and manipulator configurations. We propose Graph-Fused Vision-Language-Action (GF-VLA), a framework that enables dual-arm robotic systems to perform task-level reasoning and execution directly from RGB and Depth human demonstrations. GF-VLA first extracts Shannon-information-based cues to identify hands and objects with the highest task relevance, then encodes these cues into temporally ordered scene graphs that capture both hand-object and object-object interactions. These graphs are fused with a language-conditioned transformer that generates hierarchical behavior trees and interpretable Cartesian motion commands. To improve execution efficiency in bimanual settings, we further introduce a cross-hand selection policy that infers optimal gripper assignment without explicit geometric reasoning. We evaluate GF-VLA on four structured dual-arm block assembly tasks involving symbolic shape construction and spatial generalization. Experimental results show that the information-theoretic scene representation achieves over 95 percent graph accuracy and 93 percent subtask segmentation, supporting the LLM planner in generating reliable and human-readable task policies. When executed by the dual-arm robot, these policies yield 94 percent grasp success, 89 percent placement accuracy, and 90 percent overall task success across stacking, letter-building, and geometric reconfiguration scenarios, demonstrating strong generalization and robustness across diverse spatial and semantic variations.
Safe On-Orbit Dislodging of Deployable Structures via Robust Adaptive MPC
Mar 21, 2025
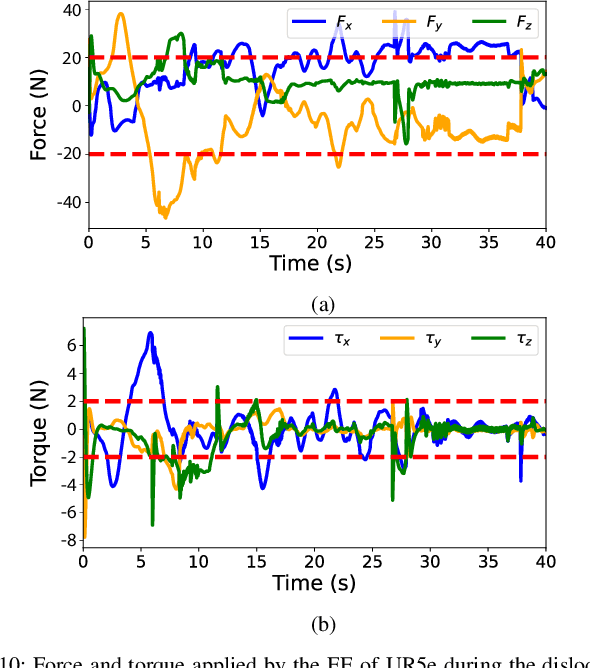


This paper proposes a novel robust adaptive model predictive controller for on-orbit dislodging. We consider the scenario where a servicer, equipped with a robot arm, must dislodge a client, a time-varying system composed of an underpowered jammed solar panel with a hybrid hinge system on a space station. Our approach leverages online set-membership identification to reduce the uncertainty to provide robust safety guarantees during dislodging despite bounded disturbances while balancing exploration and exploitation effectively in the parameter space. The feasibility of the developed robust adaptive MPC method is also examined through dislodging simulations and hardware experiments in zero-gravity and gravity environments, respectively. In addition, the advantages of our method are shown through comparison experiments with several state-of-the-art control schemes for both accuracy of parameter estimation and control performance.
Adaptive Robot Detumbling of a Non-Rigid Satellite
Jul 24, 2024The challenge of satellite stabilization, particularly those with uncertain flexible dynamics, has become a pressing concern in control and robotics. These uncertainties, especially the dynamics of a third-party client satellite, significantly complicate the stabilization task. This paper introduces a novel adaptive detumbling method to handle non-rigid satellites with unknown motion dynamics (translation and rotation). The distinctive feature of our approach is that we model the non-rigid tumbling satellite as a two-link serial chain with unknown stiffness and damping in contrast to previous detumbling research works which consider the satellite a rigid body. We develop a novel adaptive robotics approach to detumble the satellite by using two space tugs as servicer despite the uncertain dynamics in the post-capture case. Notably, the stiffness properties and other physical parameters, including the mass and inertia of the two links, remain unknown to the servicer. Our proposed method addresses the challenges in detumbling tasks and paves the way for advanced manipulation of non-rigid satellites with uncertain dynamics.
Decentralized Adaptive Aerospace Transportation of Unknown Loads Using A Team of Robots
Jul 10, 2024



Transportation missions in aerospace are limited to the capability of each aerospace robot and the properties of the target transported object, such as mass, inertia, and grasping locations. We present a novel decentralized adaptive controller design for multiple robots that can be implemented in different kinds of aerospace robots. Our controller adapts to unknown objects in different gravity environments. We validate our method in an aerial scenario using multiple fully actuated hexarotors with grasping capabilities, and a space scenario using a group of space tugs. In both scenarios, the robots transport a payload cooperatively through desired three-dimensional trajectories. We show that our method can adapt to unexpected changes that include the loss of robots during the transportation mission.