 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePre-trained Visual Representations Generalize Where it Matters in Model-Based Reinforcement Learning
Sep 16, 2025

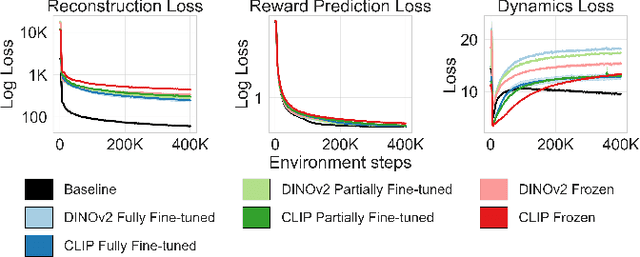
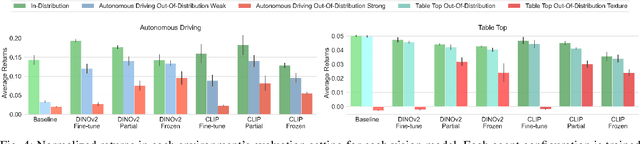
In visuomotor policy learning, the control policy for the robotic agent is derived directly from visual inputs. The typical approach, where a policy and vision encoder are trained jointly from scratch, generalizes poorly to novel visual scene changes. Using pre-trained vision models (PVMs) to inform a policy network improves robustness in model-free reinforcement learning (MFRL). Recent developments in Model-based reinforcement learning (MBRL) suggest that MBRL is more sample-efficient than MFRL. However, counterintuitively, existing work has found PVMs to be ineffective in MBRL. Here, we investigate PVM's effectiveness in MBRL, specifically on generalization under visual domain shifts. We show that, in scenarios with severe shifts, PVMs perform much better than a baseline model trained from scratch. We further investigate the effects of varying levels of fine-tuning of PVMs. Our results show that partial fine-tuning can maintain the highest average task performance under the most extreme distribution shifts. Our results demonstrate that PVMs are highly successful in promoting robustness in visual policy learning, providing compelling evidence for their wider adoption in model-based robotic learning applications.
Robotic Learning in your Backyard: A Neural Simulator from Open Source Components
Oct 25, 2024



The emergence of 3D Gaussian Splatting for fast and high-quality novel view synthesize has opened up the possibility to construct photo-realistic simulations from video for robotic reinforcement learning. While the approach has been demonstrated in several research papers, the software tools used to build such a simulator remain unavailable or proprietary. We present SplatGym, an open source neural simulator for training data-driven robotic control policies. The simulator creates a photorealistic virtual environment from a single video. It supports ego camera view generation, collision detection, and virtual object in-painting. We demonstrate training several visual navigation policies via reinforcement learning. SplatGym represents a notable first step towards an open-source general-purpose neural environment for robotic learning. It broadens the range of applications that can effectively utilise reinforcement learning by providing convenient and unrestricted tooling, and by eliminating the need for the manual development of conventional 3D environments.